PDF-Datei | 2 MB - IFSH
PDF-Datei | 2 MB - IFSH
PDF-Datei | 2 MB - IFSH

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
76<br />
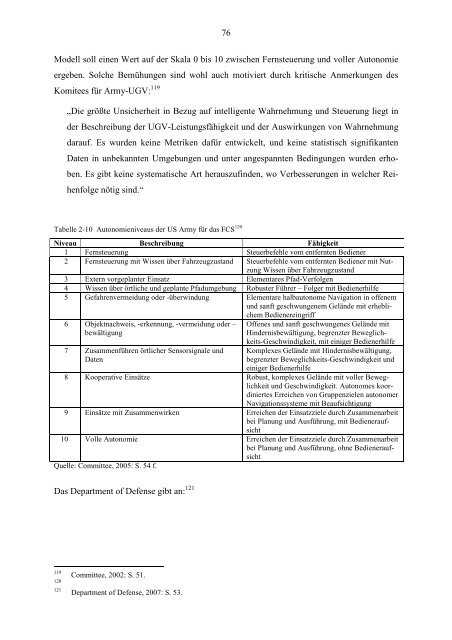
Modell soll einen Wert auf der Skala 0 bis 10 zwischen Fernsteuerung und voller Autonomie<br />
ergeben. Solche Bemühungen sind wohl auch motiviert durch kritische Anmerkungen des<br />
Komitees für Army-UGV: 119<br />
„Die größte Unsicherheit in Bezug auf intelligente Wahrnehmung und Steuerung liegt in<br />
der Beschreibung der UGV-Leistungsfähigkeit und der Auswirkungen von Wahrnehmung<br />
darauf. Es wurden keine Metriken dafür entwickelt, und keine statistisch signifikanten<br />
Daten in unbekannten Umgebungen und unter angespannten Bedingungen wurden erhoben.<br />
Es gibt keine systematische Art herauszufinden, wo Verbesserungen in welcher Reihenfolge<br />
nötig sind.“<br />
Tabelle 2-10 Autonomieniveaus der US Army für das FCS 120<br />
Niveau Beschreibung Fähigkeit<br />
1 Fernsteuerung Steuerbefehle vom entfernten Bediener<br />
2 Fernsteuerung mit Wissen über Fahrzeugzustand Steuerbefehle vom entfernten Bediener mit Nutzung<br />
Wissen über Fahrzeugzustand<br />
3 Extern vorgeplanter Einsatz Elementares Pfad-Verfolgen<br />
4 Wissen über örtliche und geplante Pfadumgebung Robuster Führer – Folger mit Bedienerhilfe<br />
5 Gefahrenvermeidung oder -überwindung Elementare halbautonome Navigation in offenem<br />
und sanft geschwungenem Gelände mit erheblichem<br />
Bedienereingriff<br />
6 Objektnachweis, -erkennung, -vermeidung oder –<br />
bewältigung<br />
7 Zusammenführen örtlicher Sensorsignale und<br />
Daten<br />
Offenes und sanft geschwungenes Gelände mit<br />
Hindernisbewältigung, begrenzter Beweglichkeits-Geschwindigkeit,<br />
mit einiger Bedienerhilfe<br />
Komplexes Gelände mit Hindernisbewältigung,<br />
begrenzter Beweglichkeits-Geschwindigkeit und<br />
einiger Bedienerhilfe<br />
8 Kooperative Einsätze Robust, komplexes Gelände mit voller Beweglichkeit<br />
und Geschwindigkeit. Autonomes koordiniertes<br />
Erreichen von Gruppenzielen autonomer<br />
Navigationssysteme mit Beaufsichtigung<br />
9 Einsätze mit Zusammenwirken Erreichen der Einsatzziele durch Zusammenarbeit<br />
bei Planung und Ausführung, mit Bedieneraufsicht<br />
10 Volle Autonomie Erreichen der Einsatzziele durch Zusammenarbeit<br />
bei Planung und Ausführung, ohne Bedieneraufsicht<br />
Quelle: Committee, 2005: S. 54 f.<br />
Das Department of Defense gibt an: 121<br />
119<br />
120<br />
121<br />
Committee, 2002: S. 51.<br />
Department of Defense, 2007: S. 53.