Dokument 1.pdf - Opus
Dokument 1.pdf - Opus
Dokument 1.pdf - Opus

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
5.2. AUSBLICK 179<br />
(a) (b)<br />
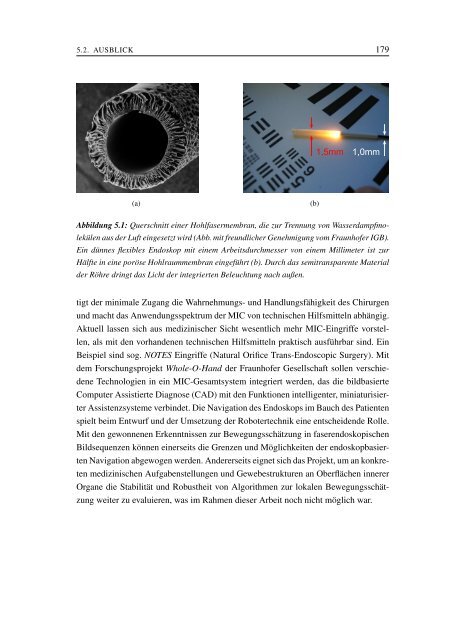
Abbildung 5.1: Querschnitt einer Hohlfasermembran, die zur Trennung von Wasserdampfmo-<br />
lekülen aus der Luft eingesetzt wird (Abb. mit freundlicher Genehmigung vom Fraunhofer IGB).<br />
Ein dünnes flexibles Endoskop mit einem Arbeitsdurchmesser von einem Millimeter ist zur<br />
Hälfte in eine poröse Hohlraummembran eingeführt (b). Durch das semitransparente Material<br />
der Röhre dringt das Licht der integrierten Beleuchtung nach außen.<br />
tigt der minimale Zugang die Wahrnehmungs- und Handlungsfähigkeit des Chirurgen<br />
und macht das Anwendungsspektrum der MIC von technischen Hilfsmitteln abhängig.<br />
Aktuell lassen sich aus medizinischer Sicht wesentlich mehr MIC-Eingriffe vorstel-<br />
len, als mit den vorhandenen technischen Hilfsmitteln praktisch ausführbar sind. Ein<br />
Beispiel sind sog. NOTES Eingriffe (Natural Orifice Trans-Endoscopic Surgery). Mit<br />
dem Forschungsprojekt Whole-O-Hand der Fraunhofer Gesellschaft sollen verschie-<br />
dene Technologien in ein MIC-Gesamtsystem integriert werden, das die bildbasierte<br />
Computer Assistierte Diagnose (CAD) mit den Funktionen intelligenter, miniaturisier-<br />
ter Assistenzsysteme verbindet. Die Navigation des Endoskops im Bauch des Patienten<br />
spielt beim Entwurf und der Umsetzung der Robotertechnik eine entscheidende Rolle.<br />
Mit den gewonnenen Erkenntnissen zur Bewegungsschätzung in faserendoskopischen<br />
Bildsequenzen können einerseits die Grenzen und Möglichkeiten der endoskopbasier-<br />
ten Navigation abgewogen werden. Andererseits eignet sich das Projekt, um an konkre-<br />
ten medizinischen Aufgabenstellungen und Gewebestrukturen an Oberflächen innerer<br />
Organe die Stabilität und Robustheit von Algorithmen zur lokalen Bewegungsschät-<br />
zung weiter zu evaluieren, was im Rahmen dieser Arbeit noch nicht möglich war.