

Theorie und Praxis des terrestrischen Laserscannings - Página web ...
Theorie und Praxis des terrestrischen Laserscannings - Página web ...
Theorie und Praxis des terrestrischen Laserscannings - Página web ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
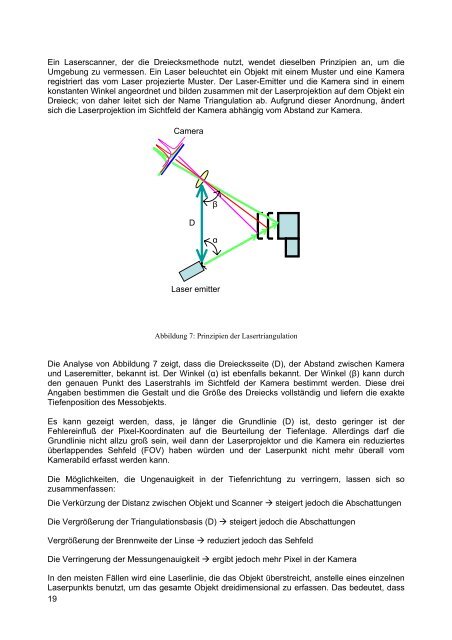
Ein Laserscanner, der die Dreiecksmethode nutzt, wendet dieselben Prinzipien an, um die<br />
Umgebung zu vermessen. Ein Laser beleuchtet ein Objekt mit einem Muster <strong>und</strong> eine Kamera<br />
registriert das vom Laser projezierte Muster. Der Laser-Emitter <strong>und</strong> die Kamera sind in einem<br />
konstanten Winkel angeordnet <strong>und</strong> bilden zusammen mit der Laserprojektion auf dem Objekt ein<br />
Dreieck; von daher leitet sich der Name Triangulation ab. Aufgr<strong>und</strong> dieser Anordnung, ändert<br />
sich die Laserprojektion im Sichtfeld der Kamera abhängig vom Abstand zur Kamera.<br />
Camera<br />
D<br />
β<br />
α<br />
Laser emitter<br />
Abbildung 7: Prinzipien der Lasertriangulation<br />
Die Analyse von Abbildung 7 zeigt, dass die Dreiecksseite (D), der Abstand zwischen Kamera<br />
<strong>und</strong> Laseremitter, bekannt ist. Der Winkel (α) ist ebenfalls bekannt. Der Winkel (β) kann durch<br />
den genauen Punkt <strong>des</strong> Laserstrahls im Sichtfeld der Kamera bestimmt werden. Diese drei<br />
Angaben bestimmen die Gestalt <strong>und</strong> die Größe <strong>des</strong> Dreiecks vollständig <strong>und</strong> liefern die exakte<br />
Tiefenposition <strong>des</strong> Messobjekts.<br />
Es kann gezeigt werden, dass, je länger die Gr<strong>und</strong>linie (D) ist, <strong>des</strong>to geringer ist der<br />
Fehlereinfluß der Pixel-Koordinaten auf die Beurteilung der Tiefenlage. Allerdings darf die<br />
Gr<strong>und</strong>linie nicht allzu groß sein, weil dann der Laserprojektor <strong>und</strong> die Kamera ein reduziertes<br />
überlappen<strong>des</strong> Sehfeld (FOV) haben würden <strong>und</strong> der Laserpunkt nicht mehr überall vom<br />
Kamerabild erfasst werden kann.<br />
Die Möglichkeiten, die Ungenauigkeit in der Tiefenrichtung zu verringern, lassen sich so<br />
zusammenfassen:<br />
Die Verkürzung der Distanz zwischen Objekt <strong>und</strong> Scanner steigert jedoch die Abschattungen<br />
Die Vergrößerung der Triangulationsbasis (D) steigert jedoch die Abschattungen<br />
Vergrößerung der Brennweite der Linse reduziert jedoch das Sehfeld<br />
Die Verringerung der Messungenauigkeit ergibt jedoch mehr Pixel in der Kamera<br />
In den meisten Fällen wird eine Laserlinie, die das Objekt überstreicht, anstelle eines einzelnen<br />
Laserpunkts benutzt, um das gesamte Objekt dreidimensional zu erfassen. Das bedeutet, dass<br />
19