

Theorie und Praxis des terrestrischen Laserscannings - Página web ...
Theorie und Praxis des terrestrischen Laserscannings - Página web ...
Theorie und Praxis des terrestrischen Laserscannings - Página web ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
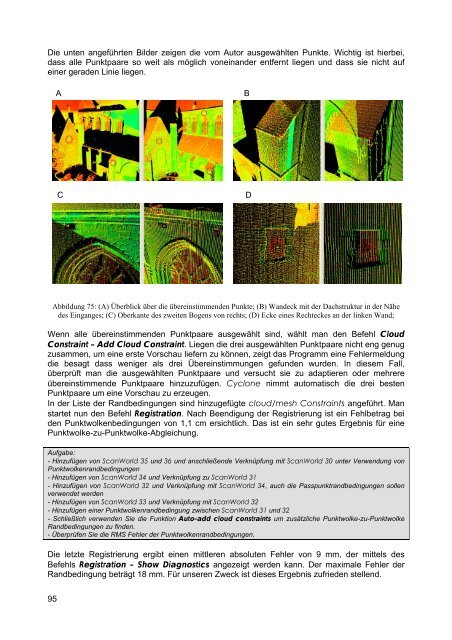
Die unten angeführten Bilder zeigen die vom Autor ausgewählten Punkte. Wichtig ist hierbei,<br />
dass alle Punktpaare so weit als möglich voneinander entfernt liegen <strong>und</strong> dass sie nicht auf<br />
einer geraden Linie liegen.<br />
A<br />
B<br />
C<br />
D<br />
Abbildung 75: (A) Überblick über die übereinstimmenden Punkte; (B) Wandeck mit der Dachstruktur in der Nähe<br />
<strong>des</strong> Einganges; (C) Oberkante <strong>des</strong> zweiten Bogens von rechts; (D) Ecke eines Rechteckes an der linken Wand;<br />
Wenn alle übereinstimmenden Punktpaare ausgewählt sind, wählt man den Befehl Cloud<br />
Constraint – Add Cloud Constraint. Liegen die drei ausgewählten Punktpaare nicht eng genug<br />
zusammen, um eine erste Vorschau liefern zu können, zeigt das Programm eine Fehlermeldung<br />
die besagt dass weniger als drei Übereinstimmungen gef<strong>und</strong>en wurden. In diesem Fall,<br />
überprüft man die ausgewählten Punktpaare <strong>und</strong> versucht sie zu adaptieren oder mehrere<br />
übereinstimmende Punktpaare hinzuzufügen. Cyclone nimmt automatisch die drei besten<br />
Punktpaare um eine Vorschau zu erzeugen.<br />
In der Liste der Randbedingungen sind hinzugefügte cloud/mesh Constraints angeführt. Man<br />
startet nun den Befehl Registration. Nach Beendigung der Registrierung ist ein Fehlbetrag bei<br />
den Punktwolkenbedingungen von 1,1 cm ersichtlich. Das ist ein sehr gutes Ergebnis für eine<br />
Punktwolke-zu-Punktwolke-Abgleichung.<br />
Aufgabe:<br />
- Hinzufügen von ScanWorld 35 <strong>und</strong> 36 <strong>und</strong> anschließende Verknüpfung mit ScanWorld 30 unter Verwendung von<br />
Punktwolkenrandbedingungen<br />
- Hinzufügen von ScanWorld 34 <strong>und</strong> Verknüpfung zu ScanWorld 31<br />
- Hinzufügen von ScanWorld 32 <strong>und</strong> Verknüpfung mit ScanWorld 34, auch die Passpunktrandbedingungen sollen<br />
verwendet werden<br />
- Hinzufügen von ScanWorld 33 <strong>und</strong> Verknüpfung mit ScanWorld 32<br />
- Hinzufügen einer Punktwolkenrandbedingung zwischen ScanWorld 31 <strong>und</strong> 32<br />
- Schließlich verwenden Sie die Funktion Auto-add cloud constraints um zusätzliche Punktwolke-zu-Punktwolke<br />
Randbedingungen zu finden.<br />
- Überprüfen Sie die RMS Fehler der Punktwolkenrandbedingungen.<br />
Die letzte Registrierung ergibt einen mittleren absoluten Fehler von 9 mm, der mittels <strong>des</strong><br />
Befehls Registration – Show Diagnostics angezeigt werden kann. Der maximale Fehler der<br />
Randbedingung beträgt 18 mm. Für unseren Zweck ist dieses Ergebnis zufrieden stellend.<br />
95