

FACOLTA' DI INGEGNERIA PROGETTO DI ... - Scienza Ludica
FACOLTA' DI INGEGNERIA PROGETTO DI ... - Scienza Ludica
FACOLTA' DI INGEGNERIA PROGETTO DI ... - Scienza Ludica

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3.4.9 ATTUATORI:<br />
Gli attuatori calcolano la tensione del motore DC utilizzando il PWM duty<br />
ricavato dal controllore. Abbiamo considerato l’attrito viscoso e quello<br />
coulombiano, presenti lungo il percorso, come zona morta prima di calcolare la<br />
tensione. La massima tensione applicabile al motore DC serve per calcolare il<br />
PWM duty. Abbiamo utilizzato la seguente equazione sperimentale che prende in<br />
considerazione la tensione della batteria VB e la massima tensione del motore DC<br />
Vmax.<br />
Vmax=0.001089 � � � � 0.625<br />
3.4.10 IMPIANTO:<br />
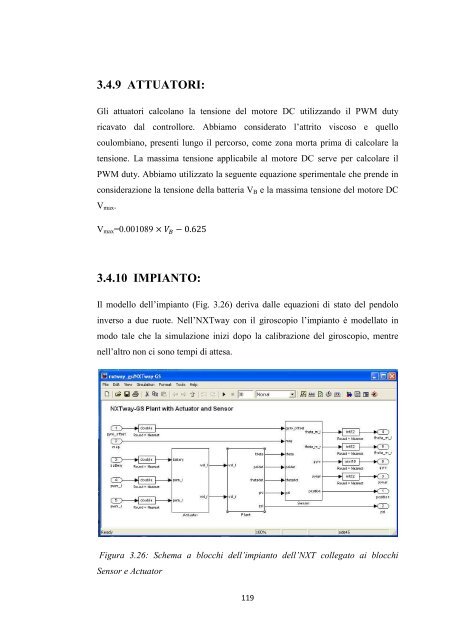
Il modello dell’impianto (Fig. 3.26) deriva dalle equazioni di stato del pendolo<br />
inverso a due ruote. Nell’NXTway con il giroscopio l’impianto è modellato in<br />
modo tale che la simulazione inizi dopo la calibrazione del giroscopio, mentre<br />
nell’altro non ci sono tempi di attesa.<br />
Figura 3.26: Schema a blocchi dell’impianto dell’NXT collegato ai blocchi<br />
Sensor e Actuator<br />
119