TMS320C6713B Floating-Point Digital Signal Processor (Rev. A)
TMS320C6713B Floating-Point Digital Signal Processor (Rev. A)
TMS320C6713B Floating-Point Digital Signal Processor (Rev. A)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
HOLD/HOLDA TIMING<br />
SPRS294 − OCTOBER 2005<br />
timing requirements for the HOLD/HOLDA cycles † (see Figure 47)<br />
NO.<br />
PYP-200,-225<br />
GDP/ZDP -225, -300<br />
PYPA -167, -200<br />
GDPA/ZDPA −200<br />
UNIT<br />
MIN MAX<br />
3 th(HOLDAL-HOLDL) Hold time, HOLD low after HOLDA low E ns<br />
† E = ECLKOUT period in ns<br />
switching characteristics over recommended operating conditions for the HOLD/HOLDA cycles †‡<br />
(see Figure 47)<br />
NO.<br />
PARAMETER<br />
PYP-200,-225<br />
GDP/ZDP -225, -300<br />
PYPA -167, -200<br />
GDPA/ZDPA −200<br />
UNIT<br />
MIN MAX<br />
1 td(HOLDL-EMHZ) Delay time, HOLD low to EMIF Bus high impedance 2E § ns<br />
2 td(EMHZ-HOLDAL) Delay time, EMIF Bus high impedance to HOLDA low 0 2E ns<br />
4 td(HOLDH-EMLZ) Delay time, HOLD high to EMIF Bus low impedance 2E 7E ns<br />
5 td(EMLZ-HOLDAH) Delay time, EMIF Bus low impedance to HOLDA high 0 2E ns<br />
† E = ECLKOUT period in ns<br />
‡ EMIF Bus consists of CE[3:0], BE[3:0], ED[31:0], EA[21:2], ARE/SDCAS/SSADS, AOE/SDRAS/SSOE, and AWE/SDWE/SSWE.<br />
§ All pending EMIF transactions are allowed to complete before HOLDA is asserted. If no bus transactions are occurring, then the minimum delay<br />
time can be achieved. Also, bus hold can be indefinitely delayed by setting NOHOLD = 1.<br />
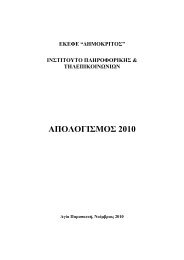
DSP Owns Bus<br />
External Requestor<br />
Owns Bus<br />
DSP Owns Bus<br />
3<br />
HOLD<br />
HOLDA<br />
2 5<br />
EMIF Bus†<br />
C6713B<br />
1<br />
4<br />
C6713B<br />
† EMIF Bus consists of CE[3:0], BE[3:0], ED[31:0], EA[21:2], ARE/SDCAS/SSADS, AOE/SDRAS/SSOE, and AWE/SDWE/SSWE.<br />
Figure 47. HOLD/HOLDA Timing<br />
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443<br />
119