TMS320C6713B Floating-Point Digital Signal Processor (Rev. A)
TMS320C6713B Floating-Point Digital Signal Processor (Rev. A)
TMS320C6713B Floating-Point Digital Signal Processor (Rev. A)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
SPRS294 − OCTOBER 2005<br />
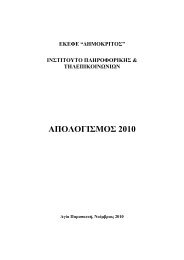
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)<br />
CLKX<br />
FSX<br />
1<br />
2<br />
DX<br />
DR<br />
6<br />
7<br />
3<br />
Bit 0 Bit(n-1) (n-2) (n-3) (n-4)<br />
4<br />
5<br />
Bit 0 Bit(n-1) (n-2) (n-3) (n-4)<br />
Figure 62. McBSP Timing as SPI Master or Slave: CLKSTP = 11b, CLKXP = 0<br />
timing requirements for McBSP as SPI master or slave: CLKSTP = 10b, CLKXP = 1 †‡ (see Figure 63)<br />
NO.<br />
PYP-200,-225<br />
GDP/ZDP -225, -300<br />
PYPA -167, -200<br />
GDPA/ZDPA −200<br />
UNIT<br />
MASTER<br />
SLAVE<br />
MIN MAX MIN MAX<br />
4 tsu(DRV-CKXH) Setup time, DR valid before CLKX high 12 2 − 6P ns<br />
5 th(CKXH-DRV) Hold time, DR valid after CLKX high 4 5 + 12P ns<br />
† P = 1/CPU clock frequency in ns. For example, when running parts at 300 MHz, use P = 3.3 ns.<br />
‡ For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1.<br />
138 POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443