- Page 1 and 2:
SPRS294A − OCTOBER 2005 − REVIS
- Page 3 and 4:
REVISION HISTORY SPRS294A − OCTOB
- Page 5 and 6:
GDP and ZDP 272-Ball BGA package (b
- Page 7 and 8:
SPRS294A − OCTOBER 2005 − REVIS
- Page 9 and 10:
SPRS294A − OCTOBER 2005 − REVIS
- Page 11 and 12:
SPRS294A − OCTOBER 2005 − REVIS
- Page 13 and 14:
functional block and CPU (DSP core)
- Page 15 and 16:
Á Á Á Á Á Á ÁÁÁÁÁ ÁÁÁ
- Page 17 and 18:
SPRS294A − OCTOBER 2005 − REVIS
- Page 19 and 20:
SPRS294A − OCTOBER 2005 − REVIS
- Page 21 and 22:
SPRS294A − OCTOBER 2005 − REVIS
- Page 23 and 24:
SPRS294A − OCTOBER 2005 − REVIS
- Page 25 and 26:
SPRS294A − OCTOBER 2005 − REVIS
- Page 27 and 28:
SPRS294A − OCTOBER 2005 − REVIS
- Page 29 and 30:
SPRS294A − OCTOBER 2005 − REVIS
- Page 31 and 32:
SPRS294A − OCTOBER 2005 − REVIS
- Page 33 and 34:
SPRS294A − OCTOBER 2005 − REVIS
- Page 35 and 36:
DEVICE CONFIGURATIONS (CONTINUED) p
- Page 37 and 38:
DEVICE CONFIGURATIONS (CONTINUED) S
- Page 39 and 40:
MULTIPLEXED PINS NAME PYP GDP/ ZDP
- Page 41 and 42:
configuration examples (continued)
- Page 43 and 44:
configuration examples (continued)
- Page 45 and 46:
configuration examples (continued)
- Page 47 and 48:
DEVICE CONFIGURATIONS (CONTINUED) S
- Page 49 and 50:
SIGNAL NAME PYP PIN NO. GDP/ ZDP TY
- Page 51 and 52:
SIGNAL NAME PYP PIN NO. GDP/ ZDP HD
- Page 53 and 54:
SIGNAL NAME PYP PIN NO. GDP/ ZDP ED
- Page 55 and 56:
SIGNAL NAME PYP PIN NO. GDP/ ZDP TY
- Page 57 and 58:
SIGNAL NAME PYP PIN NO. GDP/ ZDP SP
- Page 59 and 60:
SIGNAL NAME PYP PIN NO. GDP/ ZDP 11
- Page 61 and 62:
VSS SIGNAL NAME PYP PIN NO. GDP/ ZD
- Page 63 and 64:
VSS SIGNAL NAME PYP PIN NO. GDP/ ZD
- Page 65 and 66:
SPRS294A − OCTOBER 2005 − REVIS
- Page 67 and 68:
SPRS294A − OCTOBER 2005 − REVIS
- Page 69 and 70:
SPRS294A − OCTOBER 2005 − REVIS
- Page 71 and 72:
SPRS294A − OCTOBER 2005 − REVIS
- Page 73 and 74:
SPRS294A − OCTOBER 2005 − REVIS
- Page 75 and 76:
EDMA module and EDMA selector (cont
- Page 77 and 78:
PLL and PLL controller SPRS294A −
- Page 79 and 80:
SPRS294A − OCTOBER 2005 − REVIS
- Page 81 and 82:
SPRS294A − OCTOBER 2005 − REVIS
- Page 83 and 84:
SPRS294A − OCTOBER 2005 − REVIS
- Page 85 and 86:
multichannel audio serial port (McA
- Page 87 and 88:
multichannel audio serial port (McA
- Page 89 and 90:
SPRS294A − OCTOBER 2005 − REVIS
- Page 91 and 92: SPRS294A − OCTOBER 2005 − REVIS
- Page 93 and 94: SPRS294A − OCTOBER 2005 − REVIS
- Page 95 and 96: SPRS294A − OCTOBER 2005 − REVIS
- Page 97 and 98: SPRS294A − OCTOBER 2005 − REVIS
- Page 99 and 100: SPRS294 − OCTOBER 2005 absolute m
- Page 101 and 102: PARAMETER MEASUREMENT INFORMATION S
- Page 103 and 104: PARAMETER MEASUREMENT INFORMATION (
- Page 105 and 106: INPUT AND OUTPUT CLOCKS SPRS294 −
- Page 107 and 108: INPUT AND OUTPUT CLOCKS (CONTINUED)
- Page 109 and 110: ASYNCHRONOUS MEMORY TIMING (CONTINU
- Page 111 and 112: SYNCHRONOUS-BURST MEMORY TIMING tim
- Page 113 and 114: SYNCHRONOUS DRAM TIMING timing requ
- Page 115 and 116: SYNCHRONOUS DRAM TIMING (CONTINUED)
- Page 117 and 118: SYNCHRONOUS DRAM TIMING (CONTINUED)
- Page 119 and 120: HOLD/HOLDA TIMING SPRS294 − OCTOB
- Page 121 and 122: timing requirements for reset †
- Page 123 and 124: EXTERNAL INTERRUPT TIMING SPRS294
- Page 125 and 126: MULTICHANNEL AUDIO SERIAL PORT (McA
- Page 127 and 128: INTER-INTEGRATED CIRCUITS (I2C) TIM
- Page 129 and 130: HOST-PORT INTERFACE TIMING SPRS294
- Page 131 and 132: HOST-PORT INTERFACE TIMING (CONTINU
- Page 133 and 134: MULTICHANNEL BUFFERED SERIAL PORT T
- Page 135 and 136: MULTICHANNEL BUFFERED SERIAL PORT T
- Page 137 and 138: MULTICHANNEL BUFFERED SERIAL PORT T
- Page 139 and 140: SPRS294 − OCTOBER 2005 switching
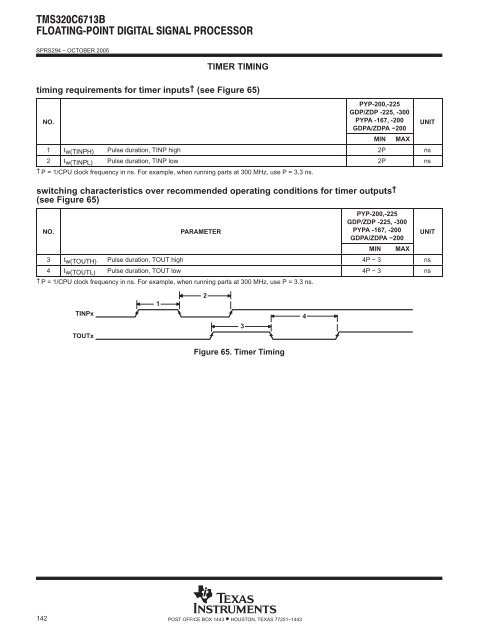
- Page 141: MULTICHANNEL BUFFERED SERIAL PORT T
- Page 145 and 146: MECHANICAL DATA SPRS294 − OCTOBER
- Page 147 and 148: SPRS294 − OCTOBER 2005 packaging
- Page 149 and 150: MECHANICAL DATA MPBG274 - MAY 2002
- Page 152: IMPORTANT NOTICE Texas Instruments