User Manual 08/2003 Edition
User Manual 08/2003 Edition
User Manual 08/2003 Edition

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1<br />
1 Brief Description 04.01 05.03<br />
1.2 Function overview and differences between 75 W / 300 W<br />
1.2 Function overview and differences between 75 W / 300 W<br />
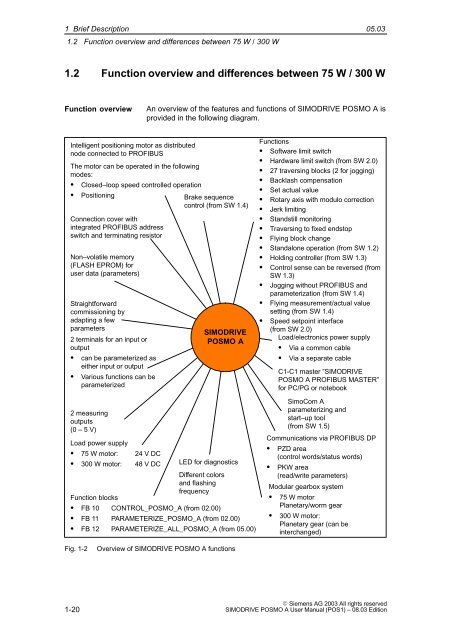
Function overview<br />
Intelligent positioning motor as distributed<br />
node connected to PROFIBUS<br />
The motor can be operated in the following<br />
modes:<br />
Closed–loop speed controlled operation<br />
Positioning<br />
Connection cover with<br />
integrated PROFIBUS address<br />
switch and terminating resistor<br />
Non–volatile memory<br />
(FLASH EPROM) for<br />
user data (parameters)<br />
Straightforward<br />
commissioning by<br />
adapting a few<br />
parameters<br />
2 terminals for an input or<br />
output<br />
can be parameterized as<br />
either input or output<br />
Various functions can be<br />
parameterized<br />
2 measuring<br />
outputs<br />
(0 – 5 V)<br />
1-20<br />
An overview of the features and functions of SIMODRIVE POSMO A is<br />
provided in the following diagram.<br />
Brake sequence<br />
control (from SW 1.4)<br />
SIMODRIVE<br />
POSMO A<br />
Load power supply<br />
75 W motor: 24 V DC<br />
300 W motor: 48 V DC LED for diagnostics<br />
Different colors<br />
and flashing<br />
frequency<br />
Function blocks<br />
FB 10 CONTROL_POSMO_A (from 02.00)<br />
FB 11 PARAMETERIZE_POSMO_A (from 02.00)<br />
FB 12 PARAMETERIZE_ALL_POSMO_A (from 05.00)<br />
Fig. 1-2 Overview of SIMODRIVE POSMO A functions<br />
Functions<br />
Software limit switch<br />
Hardware limit switch (from SW 2.0)<br />
27 traversing blocks (2 for jogging)<br />
Backlash compensation<br />
Set actual value<br />
Rotary axis with modulo correction<br />
Jerk limiting<br />
Standstill monitoring<br />
Traversing to fixed endstop<br />
Flying block change<br />
Standalone operation (from SW 1.2)<br />
Holding controller (from SW 1.3)<br />
Control sense can be reversed (from<br />
SW 1.3)<br />
Jogging without PROFIBUS and<br />
parameterization (from SW 1.4)<br />
Flying measurement/actual value<br />
setting (from SW 1.4)<br />
Speed setpoint interface<br />
(from SW 2.0)<br />
Load/electronics power supply<br />
Via a common cable<br />
Via a separate cable<br />
C1-C1 master ”SIMODRIVE<br />
POSMO A PROFIBUS MASTER”<br />
for PC/PG or notebook<br />
SimoCom A<br />
parameterizing and<br />
start–up tool<br />
(from SW 1.5)<br />
Communications via PROFIBUS DP<br />
PZD area<br />
(control words/status words)<br />
PKW area<br />
(read/write parameters)<br />
Modular gearbox system<br />
75 W motor<br />
Planetary/worm gear<br />
300 W motor:<br />
Planetary gear (can be<br />
interchanged)<br />
Siemens AG <strong>2003</strong> All rights reserved<br />
SIMODRIVE POSMO A <strong>User</strong> <strong>Manual</strong> (POS1) – <strong>08</strong>.03 <strong>Edition</strong>