

Service Manual TNC 407 / TNC 415 - heidenhain - DR. JOHANNES ...
Service Manual TNC 407 / TNC 415 - heidenhain - DR. JOHANNES ...
Service Manual TNC 407 / TNC 415 - heidenhain - DR. JOHANNES ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
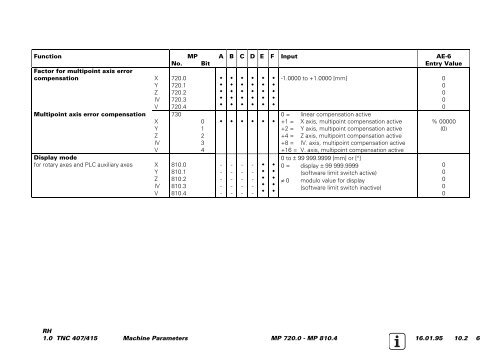
Function MP A B C D E F Input AE-6<br />
No. Bit Entry Value<br />
Factor for multipoint axis error<br />
compensation X<br />
Y<br />
Z<br />
IV<br />
V<br />
Multipoint axis error compensation<br />
X<br />
Y<br />
Z<br />
IV<br />
V<br />
Display mode<br />
for rotary axes and PLC auxiliary axes X<br />
Y<br />
Z<br />
IV<br />
V<br />
720.0<br />
720.1<br />
720.2<br />
720.3<br />
720.4<br />
730<br />
810.0<br />
810.1<br />
810.2<br />
810.3<br />
810.4<br />
0<br />
1<br />
2<br />
3<br />
4<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š Š Š Š Š Š<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
-<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
Š<br />
-1.0000 to +1.0000 [mm] 0<br />
0<br />
0<br />
0<br />
0<br />
0 = linear compensation active<br />
+1 = X axis, multipoint compensation active<br />
+2 = Y axis, multipoint compensation active<br />
+4 = Z axis, multipoint compensation active<br />
+8 = IV. axis, multipoint compensation active<br />
+16 = V. axis, multipoint compensation active<br />
0 to ± 99 999.9999 [mm] or [°]<br />
0 = display ± 99 999.9999<br />
(software limit switch active)<br />
≠ 0 modulo value for display<br />
(software limit switch inactive)<br />
% 00000<br />
(0)<br />
RH<br />
1.0 <strong>TNC</strong> <strong>407</strong>/<strong>415</strong> Machine Parameters MP 720.0 - MP 810.4 16.01.95 10.2 6<br />
0<br />
0<br />
0<br />
0<br />
0














