

Elektrizität und Magnetismus - Physik-Institut - Universität Zürich
Elektrizität und Magnetismus - Physik-Institut - Universität Zürich
Elektrizität und Magnetismus - Physik-Institut - Universität Zürich

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
F<br />
r<br />
B<br />
r<br />
also eine negative Gleichspannung. Der negative Pol der Maschine ist die<br />
Zylinderoberfläche. Da man den Zylinder vor einem Pol eines Stabmagneten<br />
rotieren lassen kann, wurde der Name “Unipolarmaschine” geprägt, sie<br />
wurde 1831 von Faraday als erster Gleichspannungsgenerator gebaut.<br />
Die Unipolarmaschine ist ein Beispiel, in dem die Integralform des Faradayschen Gesetzes<br />
versagt. Zwischen Achse <strong>und</strong> Zylinderoberfläche wird eine EMK induziert, obwohl der<br />
Stromkreis räumlich konstant bleibt; aber die Ladungsträger der Metallscheibe bewegen<br />
sich im ⃗ B-Feld. Die erzeugte Spannung ist gering <strong>und</strong> damit schwierig zu messen.<br />
5.2.5 Widerstandsdämpfung beim Galvanometer †<br />
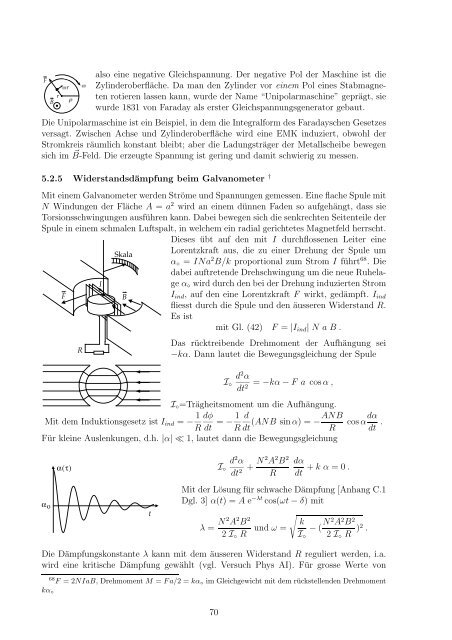
Mit einem Galvanometer werden Ströme <strong>und</strong> Spannungen gemessen. Eine flache Spule mit<br />
N Windungen der Fläche A = a 2 wird an einem dünnen Faden so aufgehängt, dass sie<br />
Torsionsschwingungen ausführen kann. Dabei bewegen sich die senkrechten Seitenteile der<br />
Spule in einem schmalen Luftspalt, in welchem ein radial gerichtetes Magnetfeld herrscht.<br />
Dieses übt auf den mit I durchflossenen Leiter eine<br />
Skala<br />
Lorentzkraft aus, die zu einer Drehung der Spule um<br />
α ◦ = INa 2 B/k proportional zum Strom I führt 68 . Die<br />
dabei auftretende Drehschwingung um die neue Ruhelage<br />
α ◦ wird durch den bei der Drehung induzierten Strom<br />
I<br />
F<br />
B I ind , auf den eine Lorentzkraft F wirkt, gedämpft. I ind<br />
fliesst durch die Spule <strong>und</strong> den äusseren Widerstand R.<br />
Es ist<br />
mit Gl. (42) F = |I ind | N a B .<br />
R<br />
Das rücktreibende Drehmoment der Aufhängung sei<br />
−kα. Dann lautet die Bewegungsgleichung der Spule<br />
d 2 α<br />
I ◦ = −kα − F a cos α ,<br />
dt2 I ◦ =Trägheitsmoment um die Aufhängung.<br />
Mit dem Induktionsgesetz ist I ind = − 1 dφ<br />
R dt = − 1 d<br />
(ANB sin α) = −ANB<br />
R dt R<br />
Für kleine Auslenkungen, d.h. |α| ≪ 1, lautet dann die Bewegungsgleichung<br />
cos αdα<br />
dt .<br />
α ο<br />
α(τ)<br />
t<br />
d 2 α<br />
I ◦<br />
dt + N2 A 2 B 2<br />
2 R<br />
dα<br />
dt + k α = 0 .<br />
Mit der Lösung für schwache Dämpfung [Anhang C.1<br />
Dgl. 3] α(t) = A e −λt cos(ωt − δ) mit<br />
λ = N2 A 2 B 2<br />
2 I ◦ R <strong>und</strong> ω = √<br />
k<br />
I ◦<br />
− ( N2 A 2 B 2<br />
2 I ◦ R )2 .<br />
Die Dämpfungskonstante λ kann mit dem äusseren Widerstand R reguliert werden, i.a.<br />
wird eine kritische Dämpfung gewählt (vgl. Versuch Phys AI). Für grosse Werte von<br />
68 F = 2NIaB, Drehmoment M = Fa/2 = kα ◦ im Gleichgewicht mit dem rückstellenden Drehmoment<br />
kα ◦<br />
70













