

Microseismic Monitoring and Geomechanical Modelling of CO2 - bris
Microseismic Monitoring and Geomechanical Modelling of CO2 - bris
Microseismic Monitoring and Geomechanical Modelling of CO2 - bris

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3.2. INVERSION METHOD<br />
2800<br />
2800<br />
2600<br />
2600<br />
2400<br />
2400<br />
Velocity (m/s)<br />
2200<br />
2000<br />
1800<br />
1600<br />
V P<br />
V S1<br />
Velocity (m/s)<br />
2200<br />
2000<br />
1800<br />
1600<br />
V S2<br />
0 50 100 150<br />
V P<br />
V S1<br />
V S2<br />
1400<br />
1200<br />
1000<br />
0 50 100 150<br />
Angle <strong>of</strong> incidence<br />
(a)<br />
1400<br />
1200<br />
1000<br />
Angle <strong>of</strong> incidence<br />
(b)<br />
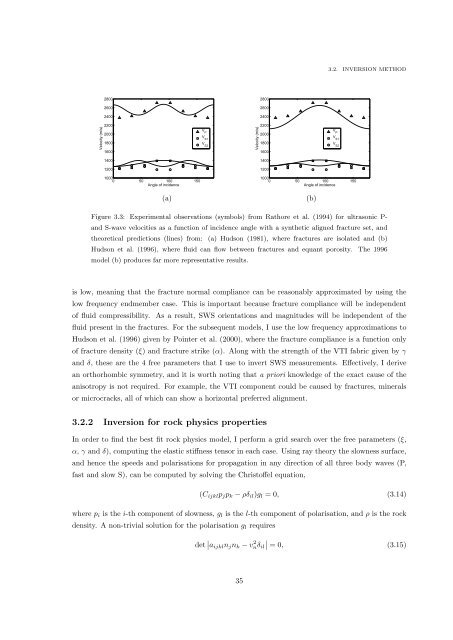
Figure 3.3: Experimental observations (symbols) from Rathore et al. (1994) for ultrasonic P-<br />
<strong>and</strong> S-wave velocities as a function <strong>of</strong> incidence angle with a synthetic aligned fracture set, <strong>and</strong><br />
theoretical predictions (lines) from: (a) Hudson (1981), where fractures are isolated <strong>and</strong> (b)<br />
Hudson et al. (1996), where fluid can flow between fractures <strong>and</strong> equant porosity. The 1996<br />
model (b) produces far more representative results.<br />
is low, meaning that the fracture normal compliance can be reasonably approximated by using the<br />
low frequency endmember case. This is important because fracture compliance will be independent<br />
<strong>of</strong> fluid compressibility. As a result, SWS orientations <strong>and</strong> magnitudes will be independent <strong>of</strong> the<br />
fluid present in the fractures. For the subsequent models, I use the low frequency approximations to<br />
Hudson et al. (1996) given by Pointer et al. (2000), where the fracture compliance is a function only<br />
<strong>of</strong> fracture density (ξ) <strong>and</strong> fracture strike (α). Along with the strength <strong>of</strong> the VTI fabric given by γ<br />
<strong>and</strong> δ, these are the 4 free parameters that I use to invert SWS measurements. Effectively, I derive<br />
an orthorhombic symmetry, <strong>and</strong> it is worth noting that a priori knowledge <strong>of</strong> the exact cause <strong>of</strong> the<br />
anisotropy is not required. For example, the VTI component could be caused by fractures, minerals<br />
or microcracks, all <strong>of</strong> which can show a horizontal preferred alignment.<br />
3.2.2 Inversion for rock physics properties<br />
In order to find the best fit rock physics model, I perform a grid search over the free parameters (ξ,<br />
α, γ <strong>and</strong> δ), computing the elastic stiffness tensor in each case. Using ray theory the slowness surface,<br />
<strong>and</strong> hence the speeds <strong>and</strong> polarisations for propagation in any direction <strong>of</strong> all three body waves (P,<br />
fast <strong>and</strong> slow S), can be computed by solving the Christ<strong>of</strong>fel equation,<br />
(C ijkl p j p k − ρδ il )g l = 0, (3.14)<br />
where p i is the i-th component <strong>of</strong> slowness, g l is the l-th component <strong>of</strong> polarisation, <strong>and</strong> ρ is the rock<br />
density. A non-trivial solution for the polarisation g l requires<br />
det ∣ ∣<br />
∣a ijkl n j n k − vnδ 2 il = 0, (3.15)<br />
35








