

Microseismic Monitoring and Geomechanical Modelling of CO2 - bris
Microseismic Monitoring and Geomechanical Modelling of CO2 - bris
Microseismic Monitoring and Geomechanical Modelling of CO2 - bris

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4.2. EVENT LOCATIONS<br />
2400<br />
Velocity Model<br />
P:S velocity ratio<br />
2600<br />
Depth (m)<br />
2800<br />
3000<br />
3200<br />
Sonic log<br />
V P<br />
3400<br />
2000 4000 6000<br />
V S<br />
Velocity (m/s)<br />
0 1<br />
P/S velocity ratio<br />
2<br />
(a)<br />
(b)<br />
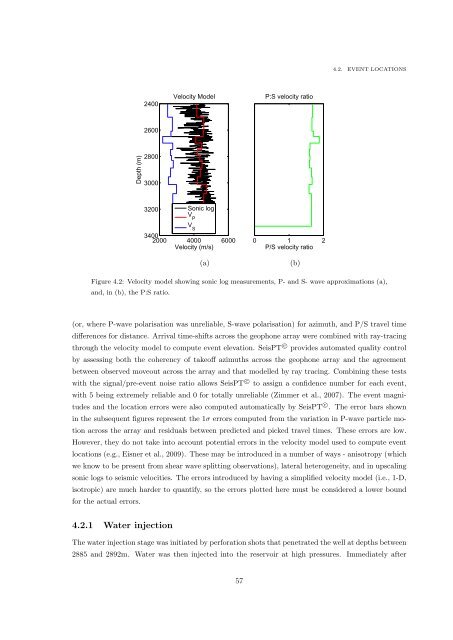
Figure 4.2: Velocity model showing sonic log measurements, P- <strong>and</strong> S- wave approximations (a),<br />
<strong>and</strong>, in (b), the P:S ratio.<br />
(or, where P-wave polarisation was unreliable, S-wave polarisation) for azimuth, <strong>and</strong> P/S travel time<br />
differences for distance. Arrival time-shifts across the geophone array were combined with ray-tracing<br />
through the velocity model to compute event elevation. SeisPT c⃝ provides automated quality control<br />
by assessing both the coherency <strong>of</strong> take<strong>of</strong>f azimuths across the geophone array <strong>and</strong> the agreement<br />
between observed moveout across the array <strong>and</strong> that modelled by ray tracing. Combining these tests<br />
with the signal/pre-event noise ratio allows SeisPT c⃝ to assign a confidence number for each event,<br />
with 5 being extremely reliable <strong>and</strong> 0 for totally unreliable (Zimmer et al., 2007). The event magnitudes<br />
<strong>and</strong> the location errors were also computed automatically by SeisPT c⃝ . The error bars shown<br />
in the subsequent figures represent the 1σ errors computed from the variation in P-wave particle motion<br />
across the array <strong>and</strong> residuals between predicted <strong>and</strong> picked travel times. These errors are low.<br />
However, they do not take into account potential errors in the velocity model used to compute event<br />
locations (e.g., Eisner et al., 2009). These may be introduced in a number <strong>of</strong> ways - anisotropy (which<br />
we know to be present from shear wave splitting observations), lateral heterogeneity, <strong>and</strong> in upscaling<br />
sonic logs to seismic velocities. The errors introduced by having a simplified velocity model (i.e., 1-D,<br />
isotropic) are much harder to quantify, so the errors plotted here must be considered a lower bound<br />
for the actual errors.<br />
4.2.1 Water injection<br />
The water injection stage was initiated by perforation shots that penetrated the well at depths between<br />
2885 <strong>and</strong> 2892m. Water was then injected into the reservoir at high pressures. Immediately after<br />
57








