CUPRINS
Curs de Fizică generală, in format electronic, pentru învăţământul ...
Curs de Fizică generală, in format electronic, pentru învăţământul ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
alegerea Sistemului de referinţă faţă de care se raportează corpul. Sistemul de referinţă este format dintrun<br />
sistem de trei axe perpendiculare între ele în spaţiul tridimensinal şi un ceasornic, în aşa fel încât să<br />
se poată determina distanţe şi durate de timp. Axele sistemului de referinţă au câte un vector unitate,<br />
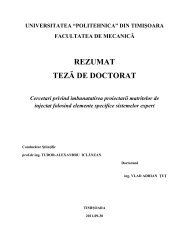
numit versor, de modul unitate, şi a cărui direcţie dă sensul pozitiv al axei respective. În fig.1.1 se<br />
prezintă un sistem de referinţă, în care axele de coordonate sunt Ox, Oy şi Oz. Versorii axelor sunt<br />
r r r<br />
vectorii i, j si k.<br />
Modul în care se exprimă poziţia corpului în spaţiu depinde de sistemul de coordonate. De<br />
regulă, cele trei numere care descriu poziţia corpului sunt proiecţiile, pe cele trei axe ale sistemului de<br />
referinţă, ale punctului care constituie centrul de masă al corpului. Acestea se numesc coordonatele<br />
carteziene ale corpului. Alte sisteme de coordonate utilizează o distanţă şi două unghiuri (coordonate<br />
sferice), sau două distanţe şi un unghi (coordonate cilindrice).<br />
Punct material. Un corp fizic cu dimensiuni neglijabile şi având masa concentrată într-un punct,<br />
numit centru de masă, se numeşte punct material. Aproximaţia de punct material constituie cel mai<br />
simplu model fizic. Pe durata deplasării sale, punctul material se numeşte mobil. Poziţia mobilului M din<br />
fig.1.1 este dată de vectorul de poziţie, exprimat în funcţie de coordonatele carteziene sub forma :<br />
r r r r<br />
= x i + y j + z k<br />
(1.1)<br />
Numerele x, y, şi z se numesc coordonatele carteziene ale punctului M.<br />
Modulul vectorului de poziţie este dat de relaţia:<br />
2<br />
2<br />
2<br />
r = x + y + z<br />
(1.2)<br />
Relaţia (1.2) a fost introdusă şi în geometria analitică, pentru a exprima distanţa dintre două<br />
puncte în spaţiu.<br />
10