

Progetto e Realizzazione di un Sensore Ibrido Omnidirezionale/pin ...
Progetto e Realizzazione di un Sensore Ibrido Omnidirezionale/pin ...
Progetto e Realizzazione di un Sensore Ibrido Omnidirezionale/pin ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
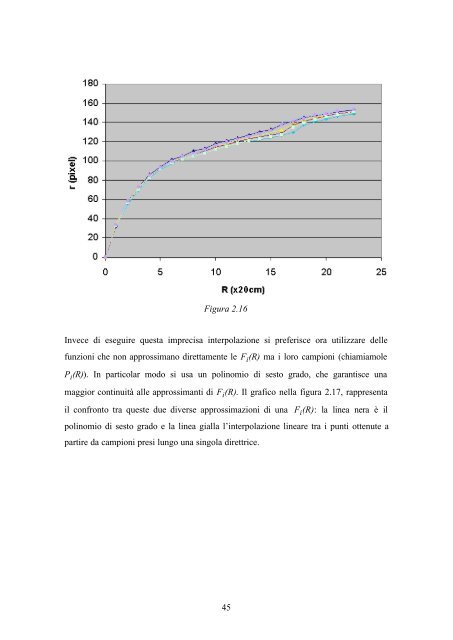
Figura 2.16<br />
Invece <strong>di</strong> eseguire questa imprecisa interpolazione si preferisce ora utilizzare delle<br />
f<strong>un</strong>zioni che non approssimano <strong>di</strong>rettamente le F i (R) ma i loro campioni (chiamiamole<br />
P i (R)). In particolar modo si usa <strong>un</strong> polinomio <strong>di</strong> sesto grado, che garantisce <strong>un</strong>a<br />
maggior continuità alle approssimanti <strong>di</strong> F i (R). Il grafico nella figura 2.17, rappresenta<br />
il confronto tra queste due <strong>di</strong>verse approssimazioni <strong>di</strong> <strong>un</strong>a F i (R): la linea nera è il<br />
polinomio <strong>di</strong> sesto grado e la linea gialla l’interpolazione lineare tra i p<strong>un</strong>ti ottenute a<br />
partire da campioni presi l<strong>un</strong>go <strong>un</strong>a singola <strong>di</strong>rettrice.<br />
45














