55'2012 - ÐаÑково-ÑÐµÑ Ð½ÑÑна бÑблÑоÑека ÐТУ "Ð¥ÐÐ" - ÐаÑÑоналÑний ...
55'2012 - ÐаÑково-ÑÐµÑ Ð½ÑÑна бÑблÑоÑека ÐТУ "Ð¥ÐÐ" - ÐаÑÑоналÑний ...
55'2012 - ÐаÑково-ÑÐµÑ Ð½ÑÑна бÑблÑоÑека ÐТУ "Ð¥ÐÐ" - ÐаÑÑоналÑний ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
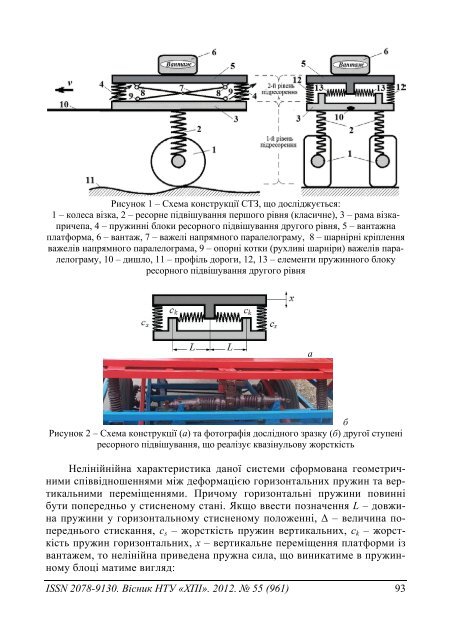
Рисунок 1 – Схема конструкції СТЗ, що досліджується:1 – колеса візка, 2 – ресорне підвішування першого рівня (класичне), 3 – рама візкапричепа,4 – пружинні блоки ресорного підвішування другого рівня, 5 – вантажнаплатформа, 6 – вантаж, 7 – важелі напрямного паралелограму, 8 – шарнірні кріпленняважелів напрямного паралелограма, 9 – опорні котки (рухливі шарніри) важелів паралелограму,10 – дишло, 11 – профіль дороги, 12, 13 – елементи пружинного блокуресорного підвішування другого рівняабРисунок 2 – Схема конструкції (а) та фотографія дослідного зразку (б) другої ступеніресорного підвішування, що реалізує квазінульову жорсткістьНелінійнійна характеристика даної системи сформована геометричнимиспіввідношеннями між деформацією горизонтальних пружин та вертикальнимипереміщеннями. Причому горизонтальні пружини повиннібути попередньо у стисненому стані. Якщо ввести позначення L – довжинапружини у горизонтальному стисненому положенні, Δ – величина попередньогостискання, c s – жорсткість пружин вертикальних, c k – жорсткістьпружин горизонтальних, x – вертикальне переміщення платформи ізвантажем, то нелінійна приведена пружна сила, що виникатиме в пружинномублоці матиме вигляд:ISSN 2078-9130. Вісник НТУ «ХПІ». 2012. № 55 (961) 93