Capítulo 1 Métodos de residuos ponderados Funciones de prueba ...
Capítulo 1 Métodos de residuos ponderados Funciones de prueba ...
Capítulo 1 Métodos de residuos ponderados Funciones de prueba ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Las cargas normales al eje <strong>de</strong> la viga actúan en el centro <strong>de</strong> corte, si no es necesario reemplazarla<br />
por una carga equivalente actuando en el centro <strong>de</strong> corte más un momento torsor<br />
distribuido.<br />
La pieza es prismática<br />
El eje <strong>de</strong> la viga es recto<br />
La sección es constante<br />
4.5.2. Definición <strong>de</strong>l sistema local <strong>de</strong> coor<strong>de</strong>nadas y el elemento maestro<br />
Debido a que toda la <strong>de</strong>scripción <strong>de</strong> la viga esta referida a su eje baricéntrico (t 1 ) y a sus dos<br />
ejes principales <strong>de</strong> inercia (t 2 y t 3 ), resulta conveniente <strong>de</strong>finir un sistema local <strong>de</strong> coor<strong>de</strong>nadas<br />
que coincida con dichos ejes. Esto permite trabajar con expresiones sencillas para las relaciones<br />
cinemáticas y constitutivas, y <strong>de</strong>sacoplar los diferentes comportamientos (flexión en dos planos<br />
ortogonales, torsión y fuerza axial)<br />
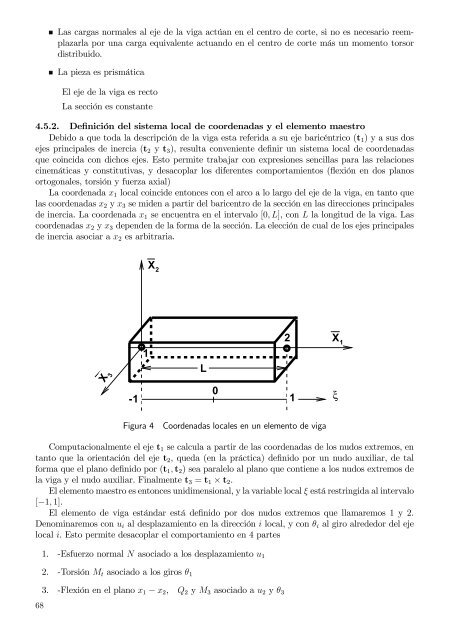
La coor<strong>de</strong>nada x 1 local coinci<strong>de</strong> entonces con el arco a lo largo <strong>de</strong>l eje <strong>de</strong> la viga, en tanto que<br />
las coor<strong>de</strong>nadas x 2 y x 3 se mi<strong>de</strong>n a partir <strong>de</strong>l baricentro <strong>de</strong> la sección en las direcciones principales<br />
<strong>de</strong> inercia. La coor<strong>de</strong>nada x 1 se encuentra en el intervalo [0, L], con L la longitud <strong>de</strong> la viga. Las<br />
coor<strong>de</strong>nadas x 2 y x 3 <strong>de</strong>pen<strong>de</strong>n <strong>de</strong> la forma <strong>de</strong> la sección. La elección <strong>de</strong> cual <strong>de</strong> los ejes principales<br />
<strong>de</strong> inercia asociar a x 2 es arbitraria.<br />
X 2<br />
1<br />
L<br />
2<br />
X 1<br />
X 3<br />
0<br />
-1 1<br />
ξ<br />
Figura 4<br />
Coor<strong>de</strong>nadas locales en un elemento <strong>de</strong> viga<br />
Computacionalmente el eje t 1 se calcula a partir <strong>de</strong> las coor<strong>de</strong>nadas <strong>de</strong> los nudos extremos, en<br />
tanto que la orientación <strong>de</strong>l eje t 2 , queda (en la práctica) <strong>de</strong>finido por un nudo auxiliar, <strong>de</strong> tal<br />
forma que el plano <strong>de</strong>finido por (t 1 , t 2 ) sea paralelo al plano que contiene a los nudos extremos <strong>de</strong><br />
la viga y el nudo auxiliar. Finalmente t 3 = t 1 × t 2 .<br />
El elemento maestro es entonces unidimensional, y la variable local ξ está restringida al intervalo<br />
[−1, 1].<br />
El elemento <strong>de</strong> viga estándar está <strong>de</strong>finido por dos nudos extremos que llamaremos 1 y 2.<br />
Denominaremos con u i al <strong>de</strong>splazamiento en la dirección i local, y con θ i al giro alre<strong>de</strong>dor <strong>de</strong>l eje<br />
local i. Esto permite <strong>de</strong>sacoplar el comportamiento en 4 partes<br />
68<br />
1. -Esfuerzo normal N asociado a los <strong>de</strong>splazamiento u 1<br />
2. -Torsión M t asociado a los giros θ 1<br />
3. -Flexión en el plano x 1 − x 2 , Q 2 y M 3 asociado a u 2 y θ 3