

Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Removing and Installing the User Flange<br />
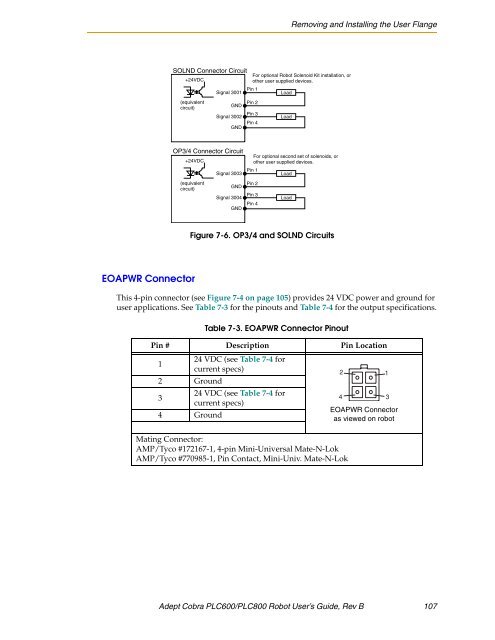
SOLND Connector Circuit<br />
+24VDC<br />
(equivalent<br />
circuit)<br />
For optional Robot Solenoid Kit installation, or<br />
other user supplied devices.<br />
Signal 3001<br />
GND<br />
Signal 3002<br />
Pin 1<br />
Pin 2<br />
Pin 3<br />
Pin 4<br />
Load<br />
Load<br />
GND<br />
OP3/4 Connector Circuit<br />
+24VDC<br />
(equivalent<br />
circuit)<br />
Signal 3003<br />
GND<br />
Signal 3004<br />
GND<br />
For optional second set of solenoids, or<br />
other user supplied devices.<br />
Pin 1<br />
Load<br />
Pin 2<br />
Pin 3<br />
Pin 4<br />
Load<br />
Figure 7-6. OP3/4 and SOLND Circuits<br />
EOAPWR Connector<br />
This 4-pin connector (see Figure 7-4 on page 105) provides 24 VDC power and ground for<br />
user applications. See Table 7-3 for the pinouts and Table 7-4 for the output specifications.<br />
Table 7-3. EOAPWR Connector Pinout<br />
Pin # Description Pin Location<br />
24 VDC (see Table 7-4 for<br />
1<br />
current specs)<br />
2 Ground<br />
24 VDC (see Table 7-4 for<br />
3<br />
current specs)<br />
4 Ground<br />
Mating Connector:<br />
AMP/Tyco #172167-1, 4-pin Mini-Universal Mate-N-Lok<br />
AMP/Tyco #770985-1, Pin Contact, Mini-Univ. Mate-N-Lok<br />
2<br />
1<br />
4 3<br />
EOAPWR Connector<br />
as viewed on robot<br />
<s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>PLC600</s<strong>tr</strong>ong>/PLC800 Robot User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev B 107













