

Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Programming the Robot<br />
Bit RSLogix 500 RSLogix 5000<br />
Bit Off<br />
State Description<br />
Bit On<br />
13 N241:0/13 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Status_Bits.13 Robot has LEFTY<br />
configuration<br />
14 N241:0/14 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Status_Bits.14 Robot has ABOVE<br />
configuration<br />
15 N241:0/15 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Status_Bits.15 Robot has NOFLIP<br />
configuration<br />
Robot has<br />
RIGHTY<br />
configuration<br />
Robot has BELOW<br />
configuration<br />
Robot has FLIP<br />
configuration<br />
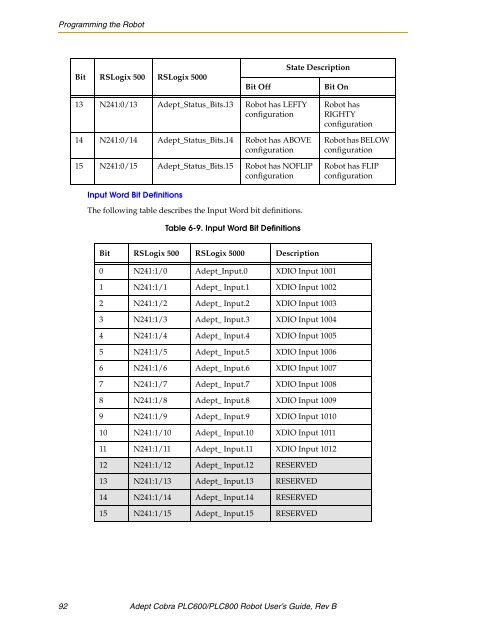
Input Word Bit Definitions<br />
The following table describes the Input Word bit definitions.<br />
Table 6-9. Input Word Bit Definitions<br />
Bit RSLogix 500 RSLogix 5000 Description<br />
0 N241:1/0 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Input.0 XDIO Input 1001<br />
1 N241:1/1 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.1 XDIO Input 1002<br />
2 N241:1/2 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.2 XDIO Input 1003<br />
3 N241:1/3 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.3 XDIO Input 1004<br />
4 N241:1/4 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.4 XDIO Input 1005<br />
5 N241:1/5 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.5 XDIO Input 1006<br />
6 N241:1/6 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.6 XDIO Input 1007<br />
7 N241:1/7 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.7 XDIO Input 1008<br />
8 N241:1/8 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.8 XDIO Input 1009<br />
9 N241:1/9 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.9 XDIO Input 1010<br />
10 N241:1/10 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.10 XDIO Input 1011<br />
11 N241:1/11 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.11 XDIO Input 1012<br />
12 N241:1/12 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.12 RESERVED<br />
13 N241:1/13 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.13 RESERVED<br />
14 N241:1/14 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.14 RESERVED<br />
15 N241:1/15 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_ Input.15 RESERVED<br />
92 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>PLC600</s<strong>tr</strong>ong>/PLC800 Robot User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev B













