

Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Robot Concepts<br />
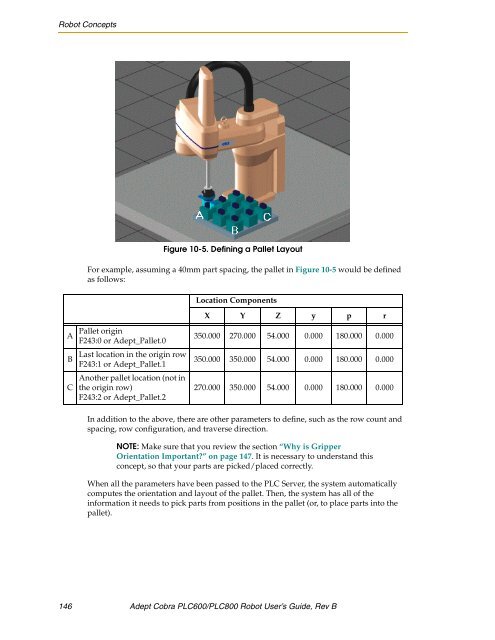
Figure 10-5. Defining a Pallet Layout<br />
For example, assuming a 40mm part spacing, the pallet in Figure 10-5 would be defined<br />
as follows:<br />
Location Components<br />
X Y Z y p r<br />
A<br />
B<br />
C<br />
Pallet origin<br />
F243:0 or <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Pallet.0<br />
Last location in the origin row<br />
F243:1 or <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Pallet.1<br />
Another pallet location (not in<br />
the origin row)<br />
F243:2 or <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Pallet.2<br />
350.000 270.000 54.000 0.000 180.000 0.000<br />
350.000 350.000 54.000 0.000 180.000 0.000<br />
270.000 350.000 54.000 0.000 180.000 0.000<br />
In addition to the above, there are other parameters to define, such as the row count and<br />
spacing, row configuration, and <strong>tr</strong>averse direction.<br />
NOTE: Make sure that you review the section “Why is Gripper<br />
Orientation Important?” on page 147. It is necessary to understand this<br />
concept, so that your parts are picked/placed correctly.<br />
When all the parameters have been passed to the PLC Server, the system automatically<br />
<s<strong>tr</strong>ong>com</s<strong>tr</strong>ong>putes the orientation and layout of the pallet. Then, the system has all of the<br />
information it needs to pick parts from positions in the pallet (or, to place parts into the<br />
pallet).<br />
146 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>PLC600</s<strong>tr</strong>ong>/PLC800 Robot User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev B













