

Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
PLC Software Overview<br />
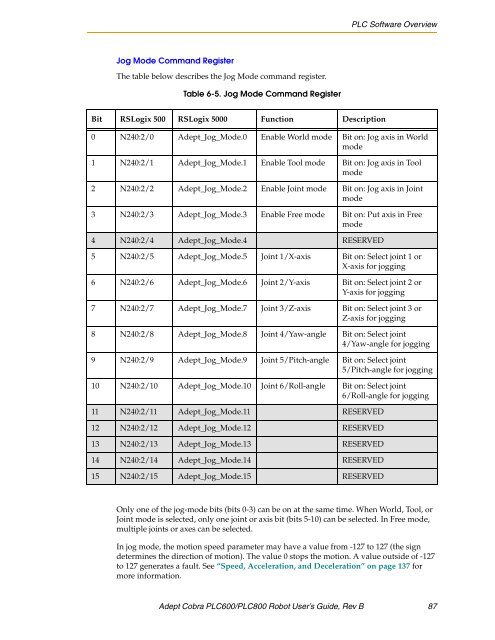
Jog Mode Command Register<br />
The table below describes the Jog Mode <s<strong>tr</strong>ong>com</s<strong>tr</strong>ong>mand register.<br />
Table 6-5. Jog Mode Command Register<br />
Bit RSLogix 500 RSLogix 5000 Function Description<br />
0 N240:2/0 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.0 Enable World mode Bit on: Jog axis in World<br />
mode<br />
1 N240:2/1 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.1 Enable Tool mode Bit on: Jog axis in Tool<br />
mode<br />
2 N240:2/2 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.2 Enable Joint mode Bit on: Jog axis in Joint<br />
mode<br />
3 N240:2/3 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.3 Enable Free mode Bit on: Put axis in Free<br />
mode<br />
4 N240:2/4 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.4 RESERVED<br />
5 N240:2/5 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.5 Joint 1/X-axis Bit on: Select joint 1 or<br />
X-axis for jogging<br />
6 N240:2/6 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.6 Joint 2/Y-axis Bit on: Select joint 2 or<br />
Y-axis for jogging<br />
7 N240:2/7 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.7 Joint 3/Z-axis Bit on: Select joint 3 or<br />
Z-axis for jogging<br />
8 N240:2/8 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.8 Joint 4/Yaw-angle Bit on: Select joint<br />
4/Yaw-angle for jogging<br />
9 N240:2/9 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.9 Joint 5/Pitch-angle Bit on: Select joint<br />
5/Pitch-angle for jogging<br />
10 N240:2/10 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.10 Joint 6/Roll-angle Bit on: Select joint<br />
6/Roll-angle for jogging<br />
11 N240:2/11 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.11 RESERVED<br />
12 N240:2/12 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.12 RESERVED<br />
13 N240:2/13 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.13 RESERVED<br />
14 N240:2/14 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.14 RESERVED<br />
15 N240:2/15 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Jog_Mode.15 RESERVED<br />
Only one of the jog-mode bits (bits 0-3) can be on at the same time. When World, Tool, or<br />
Joint mode is selected, only one joint or axis bit (bits 5-10) can be selected. In Free mode,<br />
multiple joints or axes can be selected.<br />
In jog mode, the motion speed parameter may have a value from -127 to 127 (the sign<br />
determines the direction of motion). The value 0 stops the motion. A value outside of -127<br />
to 127 generates a fault. See “Speed, Acceleration, and Deceleration” on page 137 for<br />
more information.<br />
<s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>PLC600</s<strong>tr</strong>ong>/PLC800 Robot User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev B 87













