

Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Programming the Robot<br />
To use the Jump Command to move the robot:<br />
1. Load N240:4 or <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Speed with the motion speed. 1<br />
.<br />
2. Load N240:5 or <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Acceleration with the motion acceleration. 1<br />
3. Load N240:6 or <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Location_Number with the number of the final<br />
destination location, i.e., “END” in Figure 6-4 (see page 96 for details).<br />
4. Enable/disable the motion qualifier bits in N240:3 or <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Motion_Qualifier as<br />
desired for the motion (see page 88 for details).<br />
5. Record the value in N241:2 or <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Current_Motion_Counter, the Current<br />
Motion Counter<br />
6. Enable the bit N240:0/11 or <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Command_Bits.11 (Jump Command) to start<br />
the motion.<br />
7. Wait for the value in N241:2 or <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>_Current_Motion_Counter (Current Motion<br />
Counter) to change.<br />
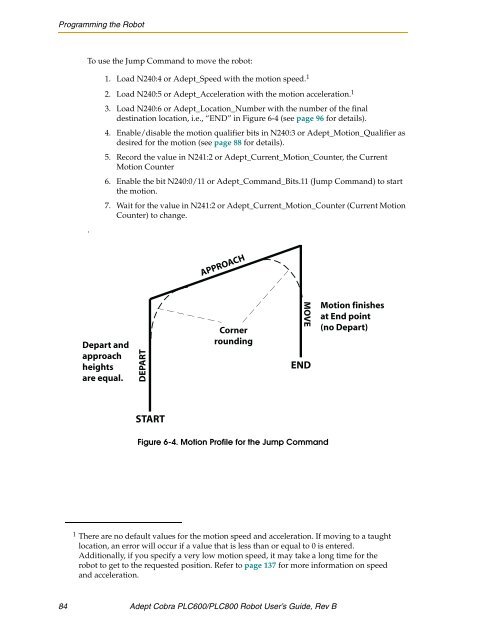
APPROACH<br />
Depart and<br />
approach<br />
heights<br />
are equal.<br />
DEPART<br />
Corner<br />
rounding<br />
MOVE<br />
END<br />
Motion finishes<br />
at End point<br />
(no Depart)<br />
START<br />
Figure 6-4. Motion Profile for the Jump Command<br />
1 There are no default values for the motion speed and acceleration. If moving to a taught<br />
location, an error will occur if a value that is less than or equal to 0 is entered.<br />
Additionally, if you specify a very low motion speed, it may take a long time for the<br />
robot to get to the requested position. Refer to page 137 for more information on speed<br />
and acceleration.<br />
84 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>PLC600</s<strong>tr</strong>ong>/PLC800 Robot User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev B













