

Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Programming the Robot<br />
6.3 PLC Software Overview<br />
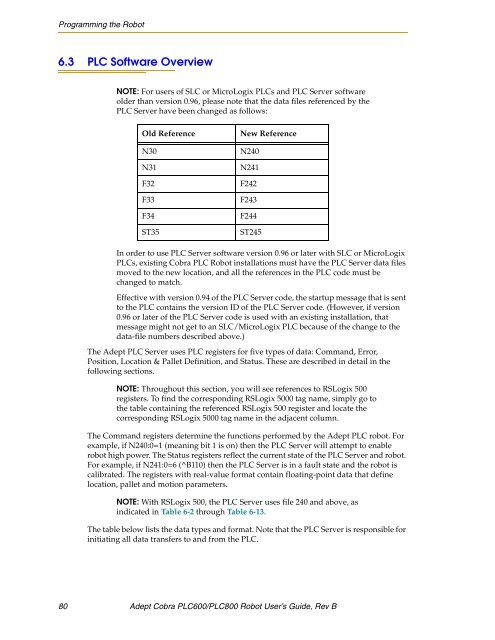
NOTE: For users of SLC or MicroLogix PLCs and PLC Server software<br />
older than version 0.96, please note that the data files referenced by the<br />
PLC Server have been changed as follows:<br />
Old Reference<br />
N30<br />
N31<br />
F32<br />
F33<br />
F34<br />
ST35<br />
New Reference<br />
N240<br />
N241<br />
F242<br />
F243<br />
F244<br />
ST245<br />
In order to use PLC Server software version 0.96 or later with SLC or MicroLogix<br />
PLCs, existing <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> PLC Robot installations must have the PLC Server data files<br />
moved to the new location, and all the references in the PLC code must be<br />
changed to match.<br />
Effective with version 0.94 of the PLC Server code, the startup message that is sent<br />
to the PLC contains the version ID of the PLC Server code. (However, if version<br />
0.96 or later of the PLC Server code is used with an existing installation, that<br />
message might not get to an SLC/MicroLogix PLC because of the change to the<br />
data-file numbers described above.)<br />
The <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> PLC Server uses PLC registers for five types of data: Command, Error,<br />
Position, Location & Pallet Definition, and Status. These are described in detail in the<br />
following sections.<br />
NOTE: Throughout this section, you will see references to RSLogix 500<br />
registers. To find the corresponding RSLogix 5000 tag name, simply go to<br />
the table containing the referenced RSLogix 500 register and locate the<br />
corresponding RSLogix 5000 tag name in the adjacent column.<br />
The Command registers determine the functions performed by the <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> PLC robot. For<br />
example, if N240:0=1 (meaning bit 1 is on) then the PLC Server will attempt to enable<br />
robot high power. The Status registers reflect the current state of the PLC Server and robot.<br />
For example, if N241:0=6 (^B110) then the PLC Server is in a fault state and the robot is<br />
calibrated. The registers with real-value format contain floating-point data that define<br />
location, pallet and motion parameters.<br />
NOTE: With RSLogix 500, the PLC Server uses file 240 and above, as<br />
indicated in Table 6-2 through Table 6-13.<br />
The table below lists the data types and format. Note that the PLC Server is responsible for<br />
initiating all data <strong>tr</strong>ansfers to and from the PLC.<br />
80 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>PLC600</s<strong>tr</strong>ong>/PLC800 Robot User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev B













