

Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr
Download Adept Cobra PLC600 User's Guide - pulsar.com.tr

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Defining a Pallet Layout<br />
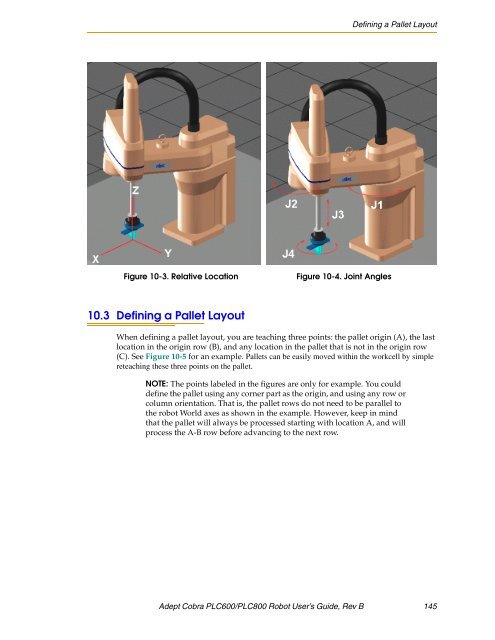
Figure 10-3. Relative Location<br />
Figure 10-4. Joint Angles<br />
10.3 Defining a Pallet Layout<br />
When defining a pallet layout, you are teaching three points: the pallet origin (A), the last<br />
location in the origin row (B), and any location in the pallet that is not in the origin row<br />
(C). See Figure 10-5 for an example. Pallets can be easily moved within the workcell by simple<br />
reteaching these three points on the pallet.<br />
NOTE: The points labeled in the figures are only for example. You could<br />
define the pallet using any corner part as the origin, and using any row or<br />
column orientation. That is, the pallet rows do not need to be parallel to<br />
the robot World axes as shown in the example. However, keep in mind<br />
that the pallet will always be processed starting with location A, and will<br />
process the A-B row before advancing to the next row.<br />
<s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>PLC600</s<strong>tr</strong>ong>/PLC800 Robot User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev B 145













