

Nomenklatur - im ZESS
Nomenklatur - im ZESS
Nomenklatur - im ZESS

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4.2 Ein adaptives Kalman-Filter zur Lastschätzung<br />
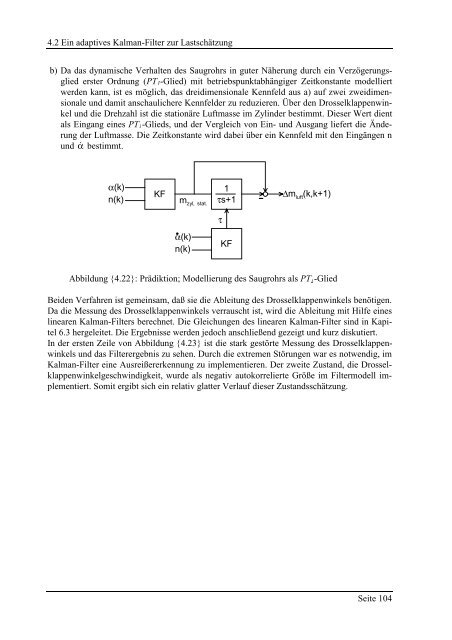
b) Da das dynamische Verhalten des Saugrohrs in guter Näherung durch ein Verzögerungsglied<br />
erster Ordnung (37�-Glied) mit betriebspunktabhängiger Zeitkonstante modelliert<br />
werden kann, ist es möglich, das dreid<strong>im</strong>ensionale Kennfeld aus a) auf zwei zweid<strong>im</strong>ensionale<br />
und damit anschaulichere Kennfelder zu reduzieren. Über den Drosselklappenwinkel<br />
und die Drehzahl ist die stationäre Luftmasse <strong>im</strong> Zylinder best<strong>im</strong>mt. Dieser Wert dient<br />
als Eingang eines 37�-Glieds, und der Vergleich von Ein- und Ausgang liefert die Änderung<br />
der Luftmasse. Die Zeitkonstante wird dabei über ein Kennfeld mit den Eingängen n<br />
und &α best<strong>im</strong>mt.<br />
α(k)<br />
n(k)<br />
KF<br />
m zyl, stat.<br />
α(k)<br />
n(k)<br />
1<br />
τs+1<br />
KF<br />
Δm luft (k,k+1)<br />
Abbildung {4.22}: Prädiktion; Modellierung des Saugrohrs als 37�-Glied<br />
τ<br />
Beiden Verfahren ist gemeinsam, daß sie die Ableitung des Drosselklappenwinkels benötigen.<br />
Da die Messung des Drosselklappenwinkels verrauscht ist, wird die Ableitung mit Hilfe eines<br />
linearen Kalman-Filters berechnet. Die Gleichungen des linearen Kalman-Filter sind in Kapitel<br />
6.3 hergeleitet. Die Ergebnisse werden jedoch anschließend gezeigt und kurz diskutiert.<br />
In der ersten Zeile von Abbildung {4.23} ist die stark gestörte Messung des Drosselklappenwinkels<br />
und das Filterergebnis zu sehen. Durch die extremen Störungen war es notwendig, <strong>im</strong><br />
Kalman-Filter eine Ausreißererkennung zu <strong>im</strong>plementieren. Der zweite Zustand, die Drosselklappenwinkelgeschwindigkeit,<br />
wurde als negativ autokorrelierte Größe <strong>im</strong> Filtermodell <strong>im</strong>plementiert.<br />
Somit ergibt sich ein relativ glatter Verlauf dieser Zustandsschätzung.<br />
Seite 104









