

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>PRECIZIA</strong> ROBOȚILOR <strong>INDUSTRIALI</strong> .<br />
.<br />
⎧Δ<br />
i−1 nT i−1 r<br />
αz +Δβx ⋅Δ γ y = y i ⋅ xi<br />
⎪ i−1 nT i−1 r<br />
⎨Δαz<br />
⋅Δγ y −Δ βx<br />
= y i ⋅ zi<br />
(3.61)<br />
⎪ i−1 nT i−1 r<br />
⎩Δ<br />
γ y +Δαz ⋅Δ βx<br />
= xi ⋅ zi<br />
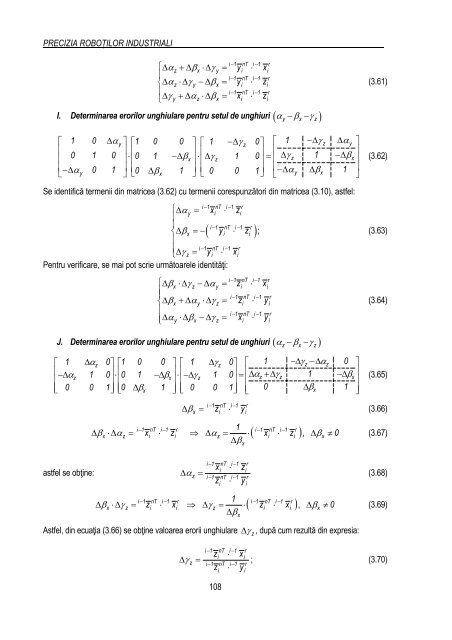
I. Determinarea erorilor unghiulare pentru setul de unghiuri ( α y −βx − γ z)<br />
⎡ 1 0 Δα ⎤ ⎡1 0 0 ⎤ ⎡ 1 −Δγ0⎤<br />
⎡ 1 −Δγ Δα<br />
⎤<br />
y z<br />
z y<br />
⎢ ⎥<br />
0 1 0<br />
⎢ ⎥ ⎢ ⎥ ⎢ ⎥<br />
⎢ ⎥⋅ 0 1 βx γ z 1 0 Δγz 1 −Δβ<br />
⎢ −Δ ⎥⋅ ⎢Δ⎥ = ⎢ x⎥<br />
⎢−Δαy 0 1 ⎥ ⎢0 Δβx 1 ⎥ ⎢ 0 0 1⎥<br />
⎢−Δαy Δβx<br />
1 ⎥<br />
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦<br />
Se identifică termenii din matricea (3.62) cu termenii corespunzători din matricea (3.10), astfel:<br />
i−1 nT i−1 r<br />
⎧Δ α y = xi ⋅ zi<br />
⎪ i−1 nT i−1 r<br />
⎨Δ<br />
βx<br />
=−( y i ⋅ zi<br />
);<br />
⎪<br />
⎪ i−1 nT i−1 r<br />
⎩Δ<br />
γ z = yi ⋅ xi<br />
Pentru verificare, se mai pot scrie următoarele identităţi:<br />
− −<br />
⎧Δβx⋅Δγ z −Δ αy<br />
= zi ⋅ xi<br />
⎪ − −<br />
⎨Δ<br />
β +Δα ⋅Δ γ = z ⋅ y<br />
⎪ − −<br />
⎪⎩ Δα ⋅Δβ −Δ γ = x ⋅ y<br />
108<br />
i 1 nT i 1 r<br />
i 1 nT i 1 r<br />
x y z i i<br />
i 1 nT i 1 r<br />
y x z i i<br />
J. Determinarea erorilor unghiulare pentru setul de unghiuri ( α −β − γ )<br />
z x<br />
z<br />
⎢ ⎥ ⎢ ⎥<br />
⎢⎣ 0 0 1⎥⎦ ⎢0 βx<br />
1 ⎥ ⎢⎣ 0 0 1⎥⎦<br />
z x z<br />
⎡ 1 Δαz 0⎤ ⎡1 0 0 ⎤ ⎡ 1 Δγ<br />
1 z 0⎤<br />
⎡ −Δγz−Δαz 0 ⎤<br />
⎢−Δα 1 0⎥⋅⎢0 1 −Δβ<br />
⎥⋅<br />
⎢−Δγ 1 0⎥=<br />
⎢Δ αz+Δγz 1 −Δβ<br />
⎥<br />
x<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎣ Δ ⎦ ⎢⎣ 0 Δβx<br />
1 ⎥⎦<br />
astfel se obţine:<br />
i−1 nT i−1 r<br />
x zi y i<br />
(3.62)<br />
(3.63)<br />
(3.64)<br />
(3.65)<br />
Δ β = ⋅ (3.66)<br />
i−1 nT i−1 r 1 i−1 nT i−1 r<br />
Δβx ⋅Δ αz = xi ⋅ zi ⇒ Δ αz = ⋅( xi ⋅ zi ), Δβx ≠ 0<br />
Δβ<br />
i−1 nT i−1 r<br />
xi ⋅ zi<br />
z i−1 nT i−1 r<br />
zi ⋅ y i<br />
Δ α =<br />
i−1 nT i−1 r 1 i−1 nT i−1 r<br />
Δβx ⋅Δ γ z = zi ⋅ xi ⇒ Δ γz = ⋅( zi ⋅ xi ), Δβx ≠ 0<br />
Δβ<br />
Astfel, din ecuaţia (3.66) se obţine valoarea erorii unghiulare Δ γ z , după cum rezultă din expresia:<br />
i−1 nT i−1 r<br />
zi ⋅ xi<br />
z i−1 nT i−1 r<br />
zi ⋅ y i<br />
Δ γ =<br />
x<br />
x<br />
(3.67)<br />
(3.68)<br />
(3.69)<br />
; (3.70)
