

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
. <strong>PRECIZIA</strong> ROBOȚILOR <strong>INDUSTRIALI</strong><br />
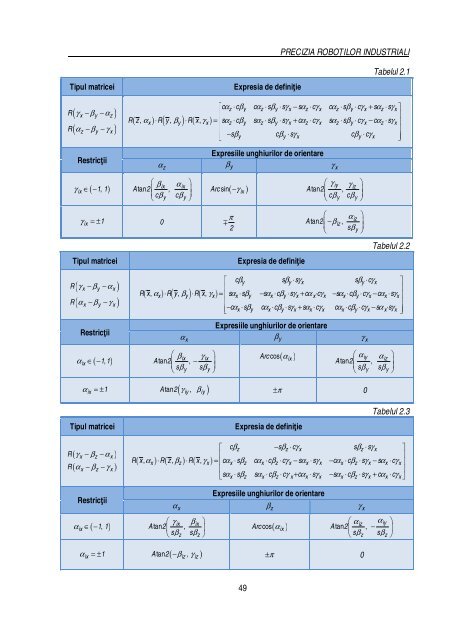
Tipul matricei Expresia de definiţie<br />
( x − y − z )<br />
( z − y − x )<br />
R γ β α<br />
R α β γ<br />
R<br />
R<br />
Restricţii<br />
49<br />
Tabelul 2.1<br />
⎡cαz ⋅cβy cαz ⋅sβy ⋅sγ x −sα z ⋅cγ x cαz ⋅sβy ⋅ cγ x + sαz ⋅sγ<br />
x ⎤<br />
⎢ ⎥<br />
R( z, αx ) ⋅R( y, βy ) ⋅ R( x, γx ) = ⎢sαz ⋅cβy sαz ⋅sβy ⋅ sγ x + cαz ⋅cγ x sαz ⋅sβy ⋅cγ x −cα z ⋅sγ<br />
x ⎥<br />
⎢ ⎥<br />
⎢⎣ −sβy cβy ⋅sγ x cβy ⋅cγ<br />
x ⎥⎦<br />
⎛ β<br />
γ ix ∈( − 1, 1)<br />
tan ix α ⎞<br />
A 2 , ix<br />
⎜ ⎟<br />
⎜ cβy cβ<br />
⎟<br />
⎝ y ⎠<br />
γ = ± 1<br />
0<br />
ix<br />
α z<br />
Expresiile unghiurilor de orientare<br />
β y<br />
γ x<br />
⎛ γ iy γ ⎞<br />
Arc sin( − γ ix )<br />
Atan 2 , iz<br />
⎜ ⎟<br />
⎜ cβy cβ<br />
⎟<br />
⎝ y ⎠<br />
π<br />
⎛ α ⎞<br />
∓ Atan 2 , iz<br />
⎜ −βiz<br />
⎟<br />
2<br />
⎜ sβ<br />
⎟<br />
⎝ y ⎠<br />
Tipul matricei Expresia de definiţie<br />
( x − y − x )<br />
( x − y − x )<br />
R γ β α<br />
R α β γ<br />
Restricţii<br />
( , ) ( , ) ( , )<br />
Tabelul 2.2<br />
⎡ cβy sβy ⋅sγ x sβy ⋅cγ<br />
x ⎤<br />
⎢ ⎥<br />
α ⋅ β ⋅ γ = ⎢ α ⋅ β − α ⋅ β ⋅ γ + α ⋅ γ − α ⋅ β ⋅ γ − α ⋅ γ ⎥<br />
⎢ ⎥<br />
⎢⎣ −cα x ⋅sβy cαx ⋅cβy ⋅ sγ x + sαx ⋅cγ x cαx ⋅cβy ⋅cγ x −sα x⋅sγ x ⎥⎦<br />
R x x R y y R x x s x s y s x c y s x c x c x s x c y c x c x s x<br />
⎛ β<br />
αix ∈( − 1, 1)<br />
tan ix γ ⎞<br />
A 2 , ix<br />
⎜ − ⎟<br />
⎜ sβy sβ<br />
⎟<br />
⎝ y ⎠<br />
α ix = ± 1<br />
tan ( iy , iy )<br />
α x<br />
Expresiile unghiurilor de orientare<br />
β y<br />
γ x<br />
Arc cos( α ix )<br />
⎛ αiy α ⎞<br />
Atan 2 , iz<br />
⎜ ⎟<br />
⎜ sβy sβ<br />
⎟<br />
⎝ y ⎠<br />
A 2 γ β ± π<br />
0<br />
Tipul matricei Expresia de definiţie<br />
( γ x − βz −α<br />
x )<br />
( α − β −γ<br />
)<br />
x z x<br />
Restricţii<br />
Tabelul 2.3<br />
⎡ cβz −sβz ⋅cγ x sβz ⋅sγ<br />
x ⎤<br />
⎢ ⎥<br />
R( x, αx ) ⋅R( z, βz ) ⋅ R( x, γx ) = ⎢cαx ⋅sβz cαx ⋅cβz ⋅cγ x −sα x ⋅sγ x −cαx ⋅cβz ⋅sγ x −sα x ⋅cγ<br />
x ⎥<br />
⎢ ⎥<br />
sα ⋅sβ sα ⋅cβ ⋅ cγ + cα ⋅sγ −sα ⋅cβ ⋅ sγ + cα ⋅cγ<br />
⎛ γ<br />
αix ∈( − 1, 1)<br />
tan ix β<br />
A 2 , ix ⎞<br />
⎜ ⎟<br />
⎝ sβz sβz<br />
⎠<br />
ix<br />
⎣ x z x z x x x x z x x x ⎦<br />
Expresiile unghiurilor de orientare<br />
α x<br />
β z<br />
γ x<br />
⎛ α αiy<br />
Arc cos( α ix )<br />
Atan 2 iz ⎞<br />
⎜ , − ⎟<br />
⎝ sβz sβz<br />
⎠<br />
α = ± 1<br />
Atan 2( − β , γ )<br />
± π<br />
0<br />
iz iz
