

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
5. MODELAREA ERORILOR DE DISTRIBUȚIE A MASELOR<br />
5.1 Matricele erorilor cinematice<br />
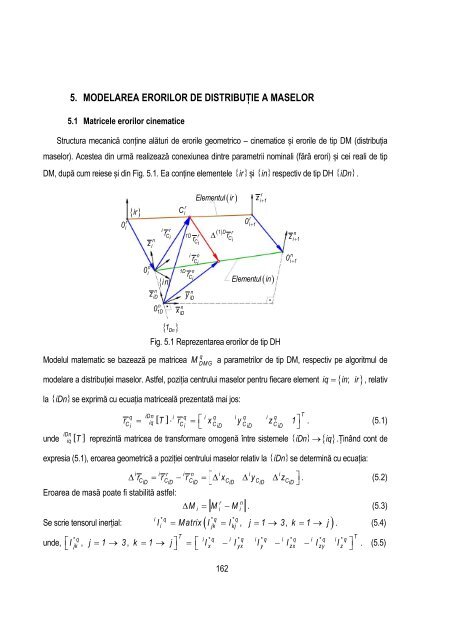
Structura mecanică conține alături de erorile geometrico – cinematice și erorile de tip DM (distribuția<br />
maselor). Acestea din urmă realizează conexiunea dintre parametrii nominali (fără erori) și cei reali de tip<br />
DM, după cum reiese și din Fig. 5.1. Ea conține elementele { ir} și { in} respectiv de tip DH { iDn } .<br />
Modelul matematic se bazează pe matricea<br />
Elementul ir z i+ 1<br />
Fig. 5.1 Reprezentarea r<br />
C<br />
erorilor de tip DH<br />
i<br />
r<br />
0<br />
Fig. 5.1 Reprezentarea erorilor de tip DH<br />
q<br />
M DMG a parametrilor de tip DM, respectiv pe algoritmul de<br />
modelare a distribuției maselor. Astfel, poziția centrului maselor pentru fiecare element iq { in; ir}<br />
la { }<br />
iDn se exprimă cu ecuația matriceală prezentată mai jos:<br />
unde<br />
162<br />
T<br />
= , relativ<br />
q<br />
rCi =<br />
iDn<br />
[ ] i<br />
iq T ⋅<br />
q<br />
rCi i q<br />
= ⎡<br />
⎣<br />
xCiD i q<br />
y CiD i q<br />
zCiD 1⎤<br />
⎦<br />
. (5.1)<br />
iq [ T ] reprezintă matricea de transformare omogenă între sistemele { iDn} → { iq}<br />
.Ținând cont de<br />
iDn<br />
expresia (5.1), eroarea geometrică a poziției centrului maselor relativ la { }<br />
iDn se determină cu ecuația:<br />
i<br />
Δ rCiD i r<br />
= rCiD i n<br />
− rCiD i<br />
= ⎡<br />
⎣<br />
Δ xCiD i<br />
Δ yCiD i<br />
Δ z ⎤ CiD<br />
⎦<br />
. (5.2)<br />
Eroarea de masă poate fi stabilită astfel:<br />
Δ M =<br />
r<br />
M<br />
n<br />
− M . (5.3)<br />
i i i<br />
i * q * q * q<br />
Se scrie tensorul inerțial: Ii Matrix( I jk Ikj , j 1 3, k 1 j)<br />
unde,<br />
r<br />
0i<br />
{ ir}<br />
n<br />
z i<br />
n<br />
0i<br />
z<br />
n<br />
iD<br />
n<br />
01D<br />
i r<br />
rC<br />
i<br />
{ in}<br />
{ 1Dn}<br />
1D r<br />
rC<br />
i<br />
i n<br />
rC<br />
i<br />
1D n<br />
rC<br />
i<br />
n<br />
y iD<br />
n<br />
x iD<br />
( )<br />
Δ<br />
= = = → = → . (5.4)<br />
* q<br />
T<br />
i * q i * q i * q i * q i * q i * q<br />
T<br />
jk , = → , = → = x − yx y − zx − zy z<br />
⎡I j 1 3 k 1 j⎤ ⎡ I I I I I I ⎤<br />
⎣ ⎦ ⎣ ⎦ . (5.5)<br />
( )<br />
1D r<br />
rC<br />
i<br />
i+ 1<br />
Elementul ( in)<br />
r<br />
z<br />
0<br />
n<br />
i+ 1<br />
n<br />
i+ 1
