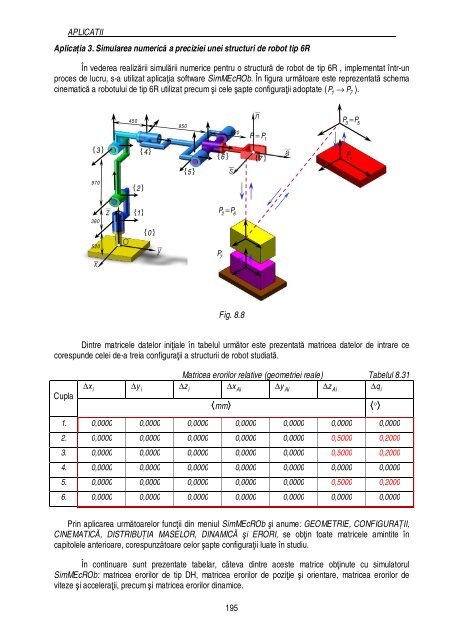
APLICATII Aplicația 3. Simularea numerică a preciziei unei structuri de robot tip 6R În vederea realizării simulării numerice pentru o structură de robot de tip 6R , implementat într-un proces de lucru, s-a utilizat aplicaţia software SimMEcROb. În figura următoare este reprezentată schema cinematică a robotului de tip 6R utilizat precum şi cele şapte configuraţii adoptate ( P1 → P7 ). Fig. 8.8 Dintre matricele datelor iniţiale în tabelul următor este prezentată matricea datelor de intrare ce corespunde celei de-a treia configuraţii a structurii de robot studiată. Cupla { } 3 { } 4 970 380 520 450 { } 2 { } 1 { } 0 950 { } 5 { } 6 P2 = P6 P7 Matricea erorilor relative (geometriei reale) Tabelul 8.31 z x y z q Δ Δ xi i y Δ i Δ Δ Ai Δ Ai Δ Ai i mm ° 1. 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 2. 0,0000 0,0000 0,0000 0,0000 0,0000 0,5000 0,2000 3. 0,0000 0,0000 0,0000 0,0000 0,0000 0,5000 0,2000 4. 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 5. 0,0000 0,0000 0,0000 0,0000 0,0000 0,5000 0,2000 6. 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 620 Prin aplicarea următoarelor funcţii din meniul SimMEcROb şi anume: GEOMETRIE, CONFIGURAȚII, CINEMATICĂ, DISTRIBUȚIA MASELOR, DINAMICĂ şi ERORI, se obţin toate matricele amintite în capitolele anterioare, corespunzătoare celor şapte configuraţii luate în studiu. În continuare sunt prezentate tabelar, câteva dintre aceste matrice obţinute cu simulatorul SimMEcROb: matricea erorilor de tip DH, matricea erorilor de poziţie şi orientare, matricea erorilor de viteze şi acceleraţii, precum şi matricea erorilor dinamice. 195 P = P1 { } 7 P3 = P5 P4
APLICATII Cupla Matricea erorilor de tip DH Tabelul 8.32 d θ Δ Δ ai−1 i Δ Δ αi −1 i Δ βi−1 mm ° 1. 0,0000 0,0000 -0,0500 0,0500 0,0000 2. -0,0500 0,0500 0,0000 0,0500 -0,0500 3. 0,0001 0,0000 0,0500 -0,0500 -0,0500 4. 0,0000 0,0000 0,0500 0,0500 0,0500 5. 0,0000 0,0000 0,0500 0,0500 -0,0500 6. 0,0000 0,0000 0,0000 0,0500 -0,0500 Valoarea { } { } Matricea erorilor de poziţie şi orientare Tabelul 8.33 d δ mm ° max. pentru x = 1, y = g 4,5321 0,0044 { } min. pentru x = 3, y = p, e, g 0,0000 0,0000 Valoarea { } { } Matricea erorilor de viteze şi acceleraţii Tabelul 8.34 Δ v Δ ω Δvɺ Δ ɺ ω 1 mm s − ⋅ 196 1 rad s − ⋅ 2 mm s − ⋅ 2 rad s − ⋅ max. pentru x = 1, y = g 2,9550 0,0040 4,545 0,021 { } min. pentru x = 3, y = p, e, g 0,0000 0,0000 0,0000 0,0000 Valoarea ⎧x = 1 ⎫ ⎪ ⎪ max. pentru ⎨y = β ⎬ ⎪ i = 2 ⎪ ⎩ ⎭ ⎧x = 3 ⎫ ⎪ ⎪ min. pentru ⎨i = 3→6 ⎬ ⎪ y = { p, e, g} ⎪ ⎩ ⎭ Δ QmQ N ⋅mm Valoarea ⎧x = 1 ⎫ 42,800 max. pentru ⎨ ⎬ ⎩y = g ⎭ ⎧⎪ x = 3 ⎫⎪ min. pentru ⎨ ⎬ ⎪⎩ y p e g ⎪⎭ 0,0000 = { , , } Matricea erorilor dinamice Tabelul 8.35 Δvɺ d 2 mm s − ⋅ Valoarea ⎧x = 1 ⎫ 0,545 max. pentru ⎨ ⎬ ⎩y = g ⎭ ⎧⎪ x = 3 ⎫⎪ min. pentru ⎨ ⎬ ⎪⎩ y p e g ⎪⎭ 0,0000 = { , , } Δ ɺ ωd 2 rad s − ⋅ 0,0592 0,0000
- Page 1 and 2:
FACULTATEA CONSTRUCŢII DE MAŞINI
- Page 3 and 4:
3. MODELAREA ERORILOR GEOMETRICE...
- Page 5 and 6:
j { { i; j} = 1 → n } p ij , vect
- Page 7 and 8:
{ unde i = 1 → n} qɺ i viteza li
- Page 9 and 10:
xy Q Δ J Matricea Jacobiană pentr
- Page 11 and 12:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 13 and 14:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 15 and 16:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 17 and 18:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 19 and 20:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 21 and 22:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 23 and 24:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 25 and 26:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 27 and 28:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 29 and 30:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 31 and 32:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 33 and 34:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 35 and 36:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 37 and 38:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 39 and 40:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 41 and 42:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 43 and 44:
NOȚIUNI GENERALE PRIVIND PRECIZIA
- Page 45 and 46:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 47 and 48:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 49 and 50:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 51 and 52:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 53 and 54:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 55 and 56:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 57 and 58:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 59 and 60:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 61 and 62:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 63 and 64:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 65 and 66:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 67 and 68:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 69 and 70:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 71 and 72:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 73 and 74:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 75 and 76:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 77 and 78:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 79 and 80:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 81 and 82:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 83 and 84:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 85 and 86:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 87 and 88:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 89 and 90:
ALGORITMI DE CALCUL ÎN CINEMATICA
- Page 91 and 92:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 93 and 94:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 95 and 96:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 97 and 98:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 99 and 100:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 101 and 102:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 103 and 104:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 105 and 106:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 107 and 108:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 109 and 110:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 111 and 112:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 113 and 114:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 115 and 116:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 117 and 118:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 119 and 120:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 121 and 122:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 123 and 124:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 125 and 126:
PRECIZIA ROBOȚILOR INDUSTRIALI . .
- Page 127 and 128:
link i −1 q ⋅k i−1 i−1 { i
- Page 129 and 130:
4.2 Matricea Jacobiană și proprie
- Page 131 and 132:
( ) n0 X && t () 135 PRECIZIA ROBO
- Page 133 and 134:
137 PRECIZIA ROBOȚILOR INDUSTRIALI
- Page 135 and 136:
139 PRECIZIA ROBOȚILOR INDUSTRIALI
- Page 137 and 138:
141 PRECIZIA ROBOȚILOR INDUSTRIALI
- Page 139 and 140: 4.5 Matricea Jacobiană a erorilor
- Page 141 and 142: 2 ( ) xek 0 J θ Δ & Q k=→ 1 n
- Page 143 and 144: 2. im 0 i i i n ∑ k= i k−1 { (
- Page 145 and 146: 149 PRECIZIA ROBOȚILOR INDUSTRIALI
- Page 147 and 148: unde, [ ] T pk ε Di βi−1αi−1
- Page 149 and 150: pk D unde, ε ∈ I11 , ceea ce în
- Page 151 and 152: I69 . Se adoptă următoarele nota
- Page 153 and 154: I ∗ Vectorii proprii ortonormali
- Page 155 and 156: Ținând seama de faptul că N = 3
- Page 157 and 158: I111. Se notează cu Y = m ∑ k k
- Page 159 and 160: PRECIZIA ROBOȚILOR INDUSTRIALI Apl
- Page 161 and 162: 6. MODELAREA ERORILOR DINAMICE 6.1
- Page 163 and 164: ( ) ( C ) n n 0 ⎧ xy 0 0 xy xy
- Page 165 and 166: 171 PRECIZIA ROBOȚILOR INDUSTRIALI
- Page 167 and 168: 173 PRECIZIA ROBOȚILOR INDUSTRIALI
- Page 169 and 170: 7. INFLUENȚA ERORILOR DINAMICE ASU
- Page 171 and 172: Prin aplicarea modelului direct al
- Page 173 and 174: q este un vector coloană m21 un ve
- Page 175 and 176: 8.APLICAȚII PRIVIND DETERMINAREA P
- Page 177 and 178: APLICATII Matricea sistemelor de ti
- Page 179 and 180: 3 4 APLICATII ⎡ 0. 77 ⎢ −0. 6
- Page 181 and 182: APLICATII Modulul erorilor vitezelo
- Page 183 and 184: APLICATII Robot M MD 6 R 15 25,2777
- Page 185 and 186: APLICATII Fig.8.4 Fig.8.5 Fig.8.6 1
- Page 187 and 188: APLICATII 192 Algoritmul matricei J
- Page 189: APLICATII 3 4 5 6 VD( t) OD( t) V(
- Page 193 and 194: [C02] H.Chung, L. Ojeda, J. Borenst
- Page 195 and 196: [M07] Moorring, B.W, Roth, Z.S, Dri
- Page 197: [O01] L.Ojeda, L. Chung, H., and Bo