

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
MODELAREA ERORILOR CINEMATICE .I.<br />
2.<br />
3.<br />
4.<br />
xy xy<br />
ijmQ imjQ<br />
Δ A =ΔA<br />
⎛i = 1→ n,<br />
⎞<br />
⎜ j = 1→ i,<br />
⎟<br />
⎜m = j → i⎟<br />
⎝ ⎠<br />
( )<br />
xy xy<br />
( )<br />
A ijQ R = Matrix AijQkl ; k = 1 → 3; l = 1 → 3 ;<br />
( 3x3)<br />
( )<br />
xy xy<br />
ijQ ijQk 4<br />
A p = Matrix A k = 1 → 3<br />
( ; )<br />
( 3x1)<br />
0<br />
⎡<br />
j ⎣<br />
x<br />
T ⎤<br />
⎦yQ U j<br />
j<br />
[ T] m Q<br />
Um m<br />
[ T] i Q<br />
0<br />
[ T] j Q<br />
U j<br />
j<br />
⎡<br />
m⎣ x<br />
T ⎤<br />
⎦yQ<br />
Um<br />
m 0 j m<br />
x<br />
⋅ [ T] + [ T] ⋅U j ⋅ [ T] ⋅Um⋅ ⎡ T ⎤ ;<br />
i Q j Q m Q i ⎣<br />
Δ<br />
⎦yQ<br />
Δ ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ Δ ⋅ ⋅<br />
( )<br />
132<br />
( ) ( )<br />
xy xy<br />
⎡ΔAijmQ R ΔAijmQ<br />
p ⎤<br />
⎢ ⎥<br />
⎢⎣ 000 0 ⎥⎦<br />
xy xy<br />
( )<br />
Δ A ijmQ R = Matrix AijmQkl ; k = 1 → 3; l = 1 → 3<br />
( 3x3)<br />
xy xy<br />
Δ A ( p) = Matrix A ; k = 1 → 4 , y = { p ; g}<br />
ijmQ ijmQk 4<br />
( )<br />
( 3x1)<br />
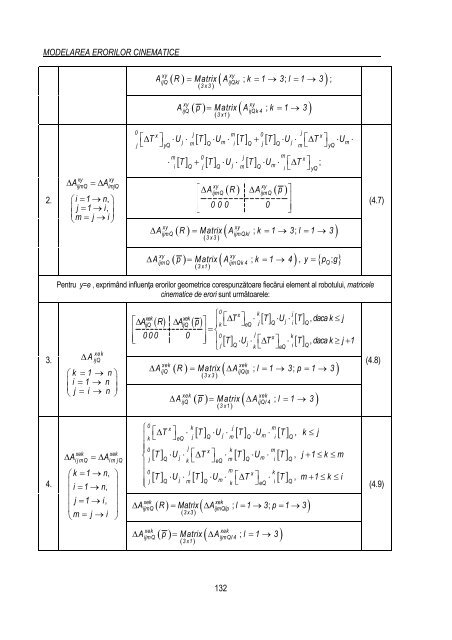
Pentru y=e , exprimând influenţa erorilor geometrice corespunzătoare fiecărui element al robotului, matricele<br />
cinematice de erori sunt următoarele:<br />
Δ A<br />
xek<br />
ijQ<br />
⎛ k = 1 → n⎞<br />
⎜ i = 1 → n ⎟<br />
⎜ j = i → n ⎟<br />
⎝ ⎠<br />
xek xek<br />
ijmQ im jQ<br />
Δ A = ΔA<br />
⎛k = 1→ n,<br />
⎞<br />
⎜ ⎟<br />
⎜<br />
i = 1→ n,<br />
⎟<br />
⎜ j = 1→ i,<br />
⎟<br />
⎜ ⎟<br />
⎝m = j → i ⎠<br />
0 ⎧ x k j<br />
xek xek<br />
⎡ ⎡<br />
( ) ( ) T ⎤<br />
ΔA [ ] j [ ] ,<br />
ijQ R ΔAijQ p ⎤ Δ ⋅ T ⋅U ⋅ T dacak≤ j<br />
⎪k⎣<br />
⎦eQ<br />
j Q i Q<br />
⎢ ⎥= ⎨<br />
000 0<br />
0 j<br />
x k<br />
⎢⎣ ⎥⎦ ⎪ [ T] ⋅Uj⋅ ⎡ΔT ⎤ ⋅ [ T] , dacak≥ j+ 1<br />
⎩ j Q k⎣ ⎦eQ<br />
i Q<br />
( )<br />
xek xek<br />
( )<br />
Δ A ijQ R = Matrix Δ AijQlp ; l = 1 → 3; p = 1 → 3<br />
( 3x3)<br />
( )<br />
xek xek<br />
ijQ ijQl 4<br />
Δ A p = Matrix Δ A l = 1 → 3<br />
( ; )<br />
( 3x1)<br />
0 ⎧ x k j m<br />
⎡ΔT ⎤ ⋅ [ T] ⋅U j ⋅ [ T] ⋅Um⋅ [ T] , k ≤ j<br />
⎪ k ⎣ ⎦eQ<br />
j Q m Q i Q<br />
⎪ 0 j<br />
x k m<br />
⎨ [ T] ⋅U j ⋅ ⎡ T ⎤ [ ] m [ ] ,<br />
j Q k ⎣<br />
Δ<br />
⎦<br />
⋅ T ⋅U ⋅ T j+ 1≤ k ≤ m<br />
eQ m Q i Q<br />
⎪<br />
0 j m<br />
⎪ x k<br />
[ T] ⋅U j ⋅ [ T] ⋅Um⋅ ⎡ΔT ⎤ ⋅ [ T] , m+ 1≤ k ≤ i<br />
⎪⎩ j Q m Q k ⎣ ⎦eQ<br />
i Q<br />
( )<br />
xek xek<br />
( )<br />
Δ AijmQ R = Matrix Δ AijmQlp ; l = 1→ 3; p = 1→ 3<br />
( 3x3)<br />
( )<br />
xek xek<br />
ijmQ ijmQl 4<br />
Δ A p = Matrix Δ A l = 1 →<br />
3<br />
( ; )<br />
( 3x1)<br />
Q<br />
(4.7)<br />
(4.8)<br />
(4.9)
