

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
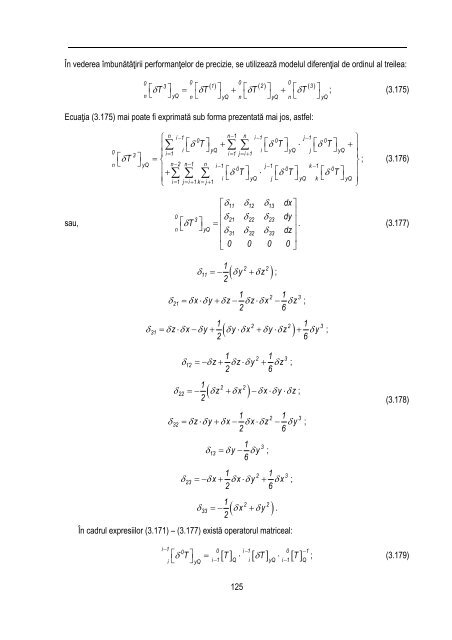
În vederea îmbunătăţirii performanţelor de precizie, se utilizează modelul diferenţial de ordinul al treilea:<br />
0 0 0 0<br />
3<br />
( 1) ( 2) ( 3<br />
⎡ )<br />
δT ⎤ ⎡δT ⎤ ⎡δT ⎤ ⎡δT ⎤<br />
n ⎣ ⎦<br />
= + +<br />
yQ n ⎣ ⎦yQ n ⎣ ⎦yQ n ⎣ ⎦yQ<br />
Ecuaţia (3.175) mai poate fi exprimată sub forma prezentată mai jos, astfel:<br />
sau,<br />
n i−1 n−1 n<br />
0<br />
i−1 0<br />
j−1 0<br />
∑ ⎡δ T⎤ ⎡δ T⎤ ⎡δ T⎤<br />
0 i ⎣ ⎦<br />
+ ∑ ∑<br />
yQ i ⎣ ⎦<br />
⋅<br />
yQ j ⎣ ⎦<br />
+<br />
yQ<br />
3<br />
i= 1 i= 1 j= i+ 1<br />
T<br />
n ⎣<br />
δ<br />
⎦ yQ n−2 n−1 n i−1 0<br />
j−1 0<br />
k−1 0<br />
+ ∑∑ ∑ ⎡δ T⎤ ⎡δ T⎤ ⎡δ T⎤<br />
i ⎣ ⎦<br />
⋅<br />
yQ j ⎣ ⎦ yQ k ⎣ ⎦ yQ<br />
i= 1 j= i+ 1k= j+ 1<br />
125<br />
; (3.175)<br />
⎧ ⎫<br />
⎪ ⎪<br />
⎡ ⎤<br />
⎪ ⎪<br />
= ⎨ ⎬;<br />
(3.176)<br />
⎪ ⎪<br />
⎪<br />
⎩<br />
⎪<br />
⎭<br />
⎡δ11 δ12δ13 dx ⎤<br />
⎢<br />
δ21 δ22δ23 dy<br />
⎥<br />
⎡ ⎤ ⎢ ⎥<br />
⎣ ⎦<br />
=<br />
. (3.177)<br />
⎢δ31 δ32δ33 dz⎥<br />
⎢ ⎥<br />
⎣ 0 0 0 0 ⎦<br />
0<br />
3<br />
δT<br />
n yQ<br />
1 2 2<br />
δ11 =− ( δy+ δz);<br />
2<br />
1 1<br />
δ21 = δx⋅ δy + δz− δz⋅δx − δz<br />
2 6<br />
2 3<br />
2 2 3<br />
( ) ;<br />
1 1<br />
δ31 = δz⋅δx− δy + δy⋅ δx + δy⋅ δz + δy<br />
2 6<br />
1 1<br />
δ12 =− δz+ δz⋅ δy + δz<br />
2 6<br />
2 3<br />
2 2 ( z x ) x y z ;<br />
1<br />
δ 22 = − δ + δ −δ ⋅δ ⋅δ<br />
2<br />
1 1<br />
δ32 = δz⋅ δy + δx− δx⋅δz − δy<br />
2 6<br />
1<br />
δ13 = δy− δy<br />
6<br />
3<br />
;<br />
;<br />
2 3<br />
1 1<br />
δ23 =− δx+ δx⋅ δy+ δx<br />
2 6<br />
2 3<br />
1 2 2<br />
δ33 =− ( δx + δy<br />
).<br />
2<br />
În cadrul expresiilor (3.171) – (3.177) există operatorul matriceal:<br />
i−1 0<br />
0 i−1 0 −1<br />
⎡δ T⎤ i ⎣ ⎦<br />
= T ⋅ δT<br />
⋅ T<br />
yQ i−1 Q i yQ i−1 Q<br />
[ ] [ ] [ ] ;<br />
;<br />
;<br />
;<br />
.<br />
(3.178)<br />
(3.179)
