

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
{ [ T] [ T]<br />
i 1 n 1}<br />
0 i−1D<br />
, , = → +<br />
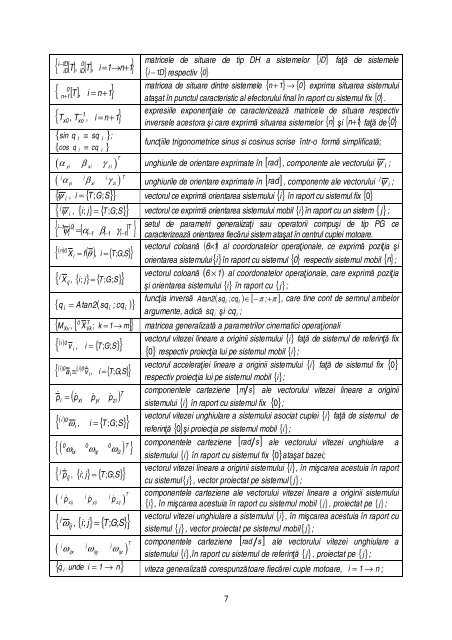
matricele de situare de tip DH a sistemelor { }<br />
iD<br />
iD<br />
0 { [ T]<br />
i = n+<br />
1}<br />
n 1<br />
+ ,<br />
− 1 { T , T , i = n+<br />
1}<br />
x 0<br />
xo<br />
{ sin q i ≡ sq i };<br />
cos q ≡ cq<br />
{ }<br />
i<br />
i<br />
iD faţă de sistemele<br />
{ i −1D} respectiv { 0 }<br />
matricea de situare dintre sistemele { n 1}<br />
→ { 0}<br />
ataşat în punctul caracteristic al efectorului final în raport cu sistemul fix { 0 } .<br />
7<br />
+ exprima situarea sistemului<br />
expresiile exponenţiale ce caracterizează matricele de situare respectiv<br />
1 0<br />
inversele acestora şi care exprimă situarea sistemelor { n } şi { n+ } faţă de { }<br />
funcţiile trigonometrice sinus si cosinus scrise într-o formă simplificată;<br />
( ) T<br />
α yi β xi γ zi unghiurile de orientare exprimate în [ rad ] , componente ale vectorului ψ i ;<br />
j j j T<br />
( α yi β xi γ zi )<br />
{ ψ i , i = { T;<br />
G;<br />
S }<br />
unghiurile de orientare exprimate în [ rad ] , componente ale vectorului<br />
vectorul ce exprimă orientarea sistemului {} i în raport cu sistemul fix { 0 }<br />
i<br />
j<br />
ψ , i;<br />
j = T;<br />
G;<br />
S vectorul ce exprimă orientarea sistemului mobil {} i în raport cu un sistem { j } ;<br />
{ { } { }<br />
i<br />
i−1<br />
{ ( 0)<br />
T<br />
ψ i = [ αi−1<br />
βi−1<br />
γi−1]<br />
}<br />
( n)<br />
0 { = f(<br />
θ ) , i = { T;<br />
G;<br />
S }<br />
X i<br />
j { , { i;<br />
j}<br />
= { T;<br />
G;<br />
S }<br />
X ij<br />
{ q = Atan2(<br />
sq ; cq ) }<br />
i<br />
{ MXv<br />
0 T [ XVk<br />
; k = 1→<br />
m]<br />
}<br />
( i)<br />
0 { , i = { T;<br />
G;<br />
S }<br />
v i<br />
i<br />
i<br />
j ψ ;<br />
setul de parametri generalizaţi sau operatorii compuşi de tip PG ce<br />
caracterizează orientarea fiecărui sistem ataşat în centrul cuplei motoare.<br />
6× 1 al coordonatelor operaţionale, ce exprimă poziţia şi<br />
vectorul coloană ( )<br />
orientarea sistemului{} i în raport cu sistemul { 0 } respectiv sistemul mobil { n } ;<br />
vectorul coloană ( 6 × 1)<br />
al coordonatelor operaţionale, care exprimă poziţia<br />
şi orientarea sistemului {} i în raport cu { j } ;<br />
funcţia inversă tan2(<br />
sq ; cq ) ∈ [ −π<br />
; + π ] , care tine cont de semnul ambelor<br />
A i i<br />
argumente, adică sq i şi i<br />
cq ;<br />
, matricea generalizată a parametrilor cinematici operaţionali<br />
vectorul vitezei lineare a originii sistemului {} i faţă de sistemul de referinţă fix<br />
( i)<br />
0 ( i { ) 0<br />
≡ v , i = { T;<br />
G;<br />
S }<br />
ɺ<br />
pɺ<br />
=<br />
i<br />
ai i<br />
( ) T<br />
pɺ<br />
pɺ<br />
pɺ<br />
xi<br />
yi<br />
zi<br />
( i)<br />
0 { ω , i = { T;<br />
G;<br />
S }<br />
i<br />
0 0 0 T<br />
{ ( ω ω ω ) }<br />
ix<br />
iy<br />
j { ɺ , { i;<br />
j}<br />
= { T;<br />
G;<br />
S }<br />
p ij<br />
( ) T<br />
j<br />
pɺ xij<br />
j<br />
pɺ yij<br />
j<br />
pɺ<br />
zij<br />
j { ω , { i;<br />
j}<br />
= { T;<br />
G;<br />
S }<br />
ij<br />
( ) T<br />
j<br />
ω ijx<br />
j<br />
ω ijy<br />
j<br />
ω ijz<br />
{ unde i = 1 → n}<br />
iz<br />
{ 0 } respectiv proiecţia lui pe sistemul mobil {} i ;<br />
vectorul acceleraţiei lineare a originii sistemului {} i faţă de sistemul fix { 0 }<br />
respectiv proiecţia lui pe sistemul mobil {} i ;<br />
componentele carteziene [ m s]<br />
ale vectorului vitezei lineare a originii<br />
sistemului {} i în raport cu sistemul fix { 0 } ;<br />
vectorul vitezei unghiulare a sistemului asociat cuplei {} i faţă de sistemul de<br />
referinţă { }<br />
0 şi proiecţia pe sistemul mobil {} i ;<br />
componentele carteziene [ rad s]<br />
ale vectorului vitezei unghiulare a<br />
sistemului {} i în raport cu sistemul fix { }<br />
0 ataşat bazei;<br />
vectorul vitezei lineare a originii sistemului {} i , în mişcarea acestuia în raport<br />
cu sistemul{ j } , vector proiectat pe sistemul{ j } ;<br />
componentele carteziene ale vectorului vitezei lineare a originii sistemului<br />
{} i , în mişcarea acestuia în raport cu sistemul mobil { j } , proiectat pe { j } ;<br />
vectorul vitezei unghiulare a sistemului {} i , în mişcarea acestuia în raport cu<br />
sistemul { j } , vector proiectat pe sistemul mobil{ j } ;<br />
componentele carteziene [ rad s]<br />
ale vectorului vitezei unghiulare a<br />
sistemului {} i ,în raport cu sistemul de referinţă { j } , proiectat pe { j } ;<br />
qɺ i<br />
viteza generalizată corespunzătoare fiecărei cuple motoare, i = 1 → n ;
