

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Robot<br />
SR<br />
SCR<br />
S FL<br />
13<br />
S TCP<br />
<strong>PRECIZIA</strong> ROBOȚILOR <strong>INDUSTRIALI</strong><br />
legate de componentele unei celule robotizate, de sistemele de referință atașate precum și de erorile pe<br />
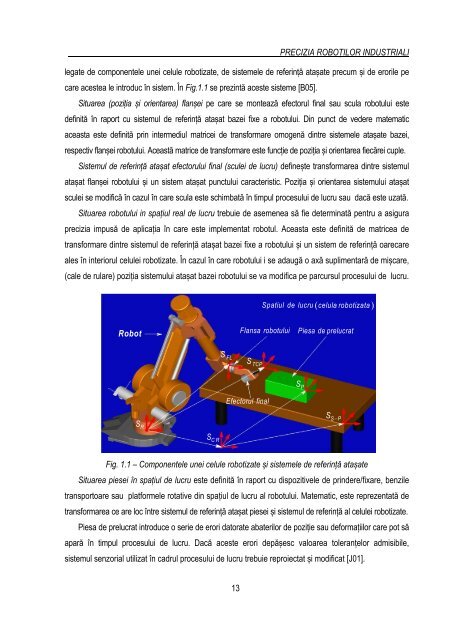
care acestea le introduc în sistem. În Fig.1.1 se prezintă aceste sisteme [B05].<br />
Situarea (poziția și orientarea) flanșei pe care se montează efectorul final sau scula robotului este<br />
definită în raport cu sistemul de referință atașat bazei fixe a robotului. Din punct de vedere matematic<br />
aceasta este definită prin intermediul matricei de transformare omogenă dintre sistemele atașate bazei,<br />
respectiv flanșei robotului. Această matrice de transformare este funcție de poziția și orientarea fiecărei cuple.<br />
Sistemul de referință atașat efectorului final (sculei de lucru) definește transformarea dintre sistemul<br />
atașat flanșei robotului și un sistem atașat punctului caracteristic. Poziția și orientarea sistemului atașat<br />
sculei se modifică în cazul în care scula este schimbată în timpul procesului de lucru sau dacă este uzată.<br />
Situarea robotului in spațiul real de lucru trebuie de asemenea să fie determinată pentru a asigura<br />
precizia impusă de aplicația în care este implementat robotul. Aceasta este definită de matricea de<br />
transformare dintre sistemul de referință atașat bazei fixe a robotului și un sistem de referință oarecare<br />
ales în interiorul celulei robotizate. În cazul în care robotului i se adaugă o axă suplimentară de mișcare,<br />
(cale de rulare) poziția sistemului atașat bazei robotului se va modifica pe parcursul procesului de lucru.<br />
Spatiul de lucru ( celula robotizata)<br />
Flansa robotului<br />
Efectorul final<br />
Piesa de prelucrat<br />
Fig. 1.1 – Componentele unei celule robotizate și sistemele de referință atașate<br />
Situarea piesei în spațiul de lucru este definită în raport cu dispozitivele de prindere/fixare, benzile<br />
transportoare sau platformele rotative din spațiul de lucru al robotului. Matematic, este reprezentată de<br />
transformarea ce are loc între sistemul de referință atașat piesei și sistemul de referință al celulei robotizate.<br />
Piesa de prelucrat introduce o serie de erori datorate abaterilor de poziție sau deformațiilor care pot să<br />
apară în timpul procesului de lucru. Dacă aceste erori depășesc valoarea toleranțelor admisibile,<br />
sistemul senzorial utilizat în cadrul procesului de lucru trebuie reproiectat și modificat [J01].<br />
SP<br />
SS−P
