

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ALGORITMI DE CALCUL ÎN CINEMATICA ȘI DINAMICA ROBOȚILOR .<br />
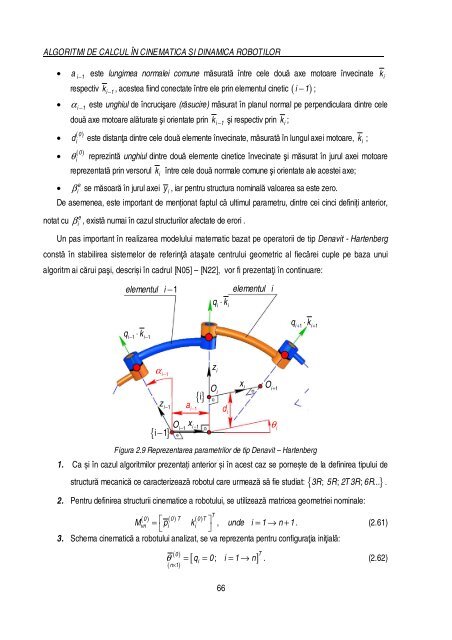
• a i− 1 este lungimea normalei comune măsurată între cele două axe motoare învecinate i k<br />
respectiv i 1<br />
k − , acestea fiind conectate între ele prin elementul cinetic ( i 1)<br />
66<br />
− ;<br />
• αi − 1 este unghiul de încrucişare (răsucire) măsurat în planul normal pe perpendiculara dintre cele<br />
•<br />
•<br />
două axe motoare alăturate şi orientate prin ki − 1 şi respectiv prin k i ;<br />
( 0)<br />
d este distanţa dintre cele două elemente învecinate, măsurată în lungul axei motoare, k i ;<br />
i<br />
( 0)<br />
θ reprezintă unghiul dintre două elemente cinetice învecinate şi măsurat în jurul axei motoare<br />
i<br />
reprezentată prin versorul k i între cele două normale comune şi orientate ale acestei axe;<br />
e<br />
i<br />
• β se măsoară în jurul axei y i , iar pentru structura nominală valoarea sa este zero.<br />
De asemenea, este important de menționat faptul că ultimul parametru, dintre cei cinci definiți anterior,<br />
e<br />
notat cu β i , există numai în cazul structurilor afectate de erori .<br />
Un pas important în realizarea modelului matematic bazat pe operatorii de tip Denavit - Hartenberg<br />
constă în stabilirea sistemelor de referinţă ataşate centrului geometric al fiecărei cuple pe baza unui<br />
algoritm ai cărui paşi, descriși în cadrul [N05] – [N22], vor fi prezentaţi în continuare:<br />
elementul i −1<br />
q ⋅k<br />
i−1 i−1<br />
αi−1 z −<br />
i 1<br />
{ i−1} Figura 2.9 Reprezentarea parametrilor de tip Denavit – Hartenberg<br />
1. Ca și în cazul algoritmilor prezentați anterior și în acest caz se pornește de la definirea tipului de<br />
structură mecanică ce caracterizează robotul care urmează să fie studiat: { 3R; 5R; 2T3R ; 6R ... } .<br />
2. Pentru definirea structurii cinematice a robotului, se utilizează matricea geometriei nominale:<br />
T<br />
( 0)<br />
( 0) T<br />
Mvn = ⎡p ⎣ i<br />
( 0) T<br />
k ⎤<br />
i ⎦<br />
, unde i = 1 → n + 1 . (2.61)<br />
3. Schema cinematică a robotului analizat, se va reprezenta pentru configuraţia iniţială:<br />
[ ]<br />
( 0)<br />
T<br />
= qi = 0; i = 1 → n . (2.62)<br />
( n 1)<br />
θ ×<br />
O −<br />
i 1<br />
a −<br />
i 1<br />
x −<br />
{} i<br />
i 1<br />
qi ⋅ki<br />
zi<br />
Oi<br />
di<br />
elementul i<br />
xi<br />
O +<br />
i 1<br />
θi<br />
q ⋅k<br />
i+ 1 i+<br />
1
