

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
ALGORITMI DE CALCUL ÎN CINEMATICA ȘI DINAMICA ROBOȚILOR .<br />
[ ] [ ] ⎡ 0 −k 3 k [ ] [ 2]<br />
⎤<br />
⎢ [ ] ⎥<br />
⎢<br />
0 1<br />
⎥<br />
⎢− [ ][ ] [ ]<br />
⎣ k [ ] ⎥<br />
A k<br />
i 2 A 1 0<br />
i<br />
⎦<br />
A i A i<br />
{ kA[ ] × } = kA[ ] [ ] −<br />
i i 3<br />
kA[<br />
i]<br />
( ) [ ]<br />
2<br />
( kA[ ] , α A[ ] ) = + { kA[ ] × } ⋅ − ( α A[<br />
] ) + { kA<br />
× } α<br />
i i 3 i 1 cos i<br />
i sin A[<br />
i]<br />
R I<br />
⎡ 0 −k<br />
[ ] [ 3] k [ ] [ 2]<br />
⎤<br />
× = ⎢ 3 [ 1]<br />
⎥<br />
⎢− [ ] [ ] [ ] [ ] ⎥<br />
⎣ kB k<br />
i 2 B 0<br />
i 1 ⎦<br />
B i B i<br />
{ kB[<br />
] } kB[ ] [ ] 0 −k<br />
i<br />
i B[<br />
i]<br />
( ( ) ) [ ]<br />
( )<br />
2<br />
( [ ] [ ] ) { [ ] } β<br />
B , βB = + B × ⋅ − B[<br />
] + { B × } β<br />
i i 3 1 cos i i sin i B[<br />
i]<br />
R k I k k<br />
⎡ 0 −k<br />
[ ][ 3] k [ ] [ 2]<br />
⎤<br />
= ⎢ 3 [ 1]<br />
⎥<br />
⎢− [ ] [ ] [ ][ ] ⎥<br />
⎣ kC k<br />
i 2 C 0<br />
i 1 ⎦<br />
C i C i<br />
{ kC[ ] × } kC[ ][ ] 0 −k<br />
i i C[<br />
i]<br />
( ) [ ]<br />
( )<br />
2<br />
( kC[ ] , γ C[ ] ) = + { kC[ ] × } ⋅ − ( γ C[<br />
] ) + { kC<br />
× } γ<br />
i i 3 i 1 cos i<br />
i sin C[<br />
i]<br />
R I<br />
T<br />
( )<br />
T<br />
( )<br />
T<br />
( )<br />
k x = 1 0 0<br />
k y = 0 1 0<br />
k = 0 0 1<br />
( )<br />
( α A[ ] − βB[ ] − γ C[ ] ) = ( kA[ ] , α A[ ] ) ⋅ ( kB[ ] , βB[ ] ) ⋅ kC[<br />
] , γ<br />
i i i i i i i i C[<br />
i]<br />
R R R R<br />
z<br />
[ ]<br />
[ ]<br />
[ ]<br />
A = x x x x y y y y z z z z<br />
B = y y z z z z x x x x y y<br />
C = z x x y x y y z y z z x<br />
= ( ( α A[ ] − β [ ] − γ<br />
i B i C[<br />
i]<br />
)[ ][ ] )<br />
lungmin lungime R 0 0<br />
> ( ( α A[ ] − β [ ] − γ<br />
i B i C[<br />
i]<br />
)[ ][ ] )<br />
lungmin lungime R l m<br />
= ( ( α A[ ] − β [ ] − γ<br />
i B i C[<br />
i]<br />
)[ ][ ] )<br />
lungmin lungime R<br />
lin[ i ] =l col [ i ] =m<br />
l m<br />
( )<br />
54<br />
R<br />
( α A[ ] − β [ ] − γ<br />
i B i C[<br />
i]<br />
)<br />
lin[ i] col[ i]<br />
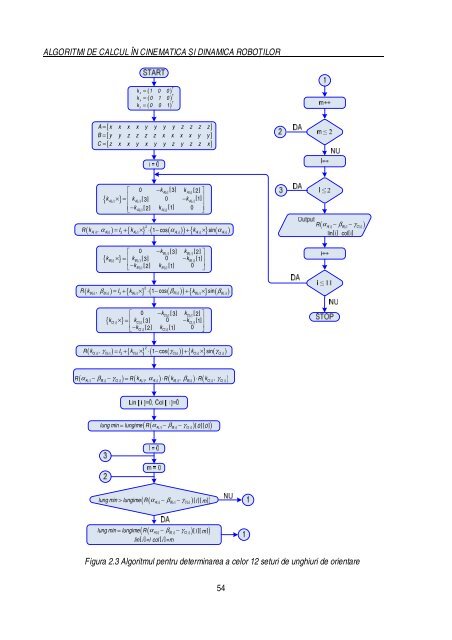
Figura 2.3 Algoritmul pentru determinarea a celor 12 seturi de unghiuri de orientare
