

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
NOȚIUNI GENERALE PRIVIND <strong>PRECIZIA</strong> ROBOȚILOR <strong>INDUSTRIALI</strong> .<br />
C. Roboţi în sistem de coordonate sferice<br />
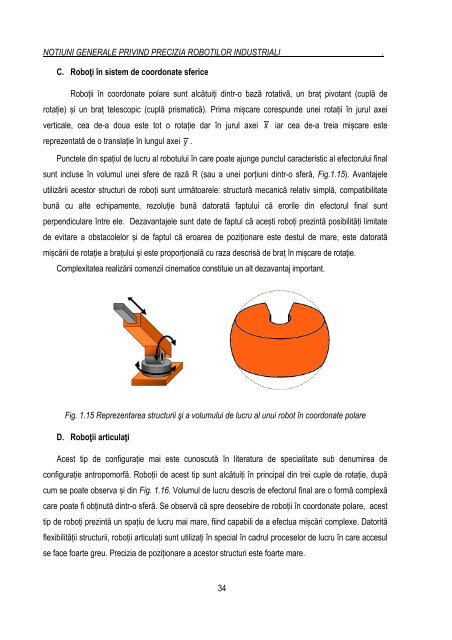
Roboții în coordonate polare sunt alcătuiți dintr-o bază rotativă, un braț pivotant (cuplă de<br />
rotație) și un braț telescopic (cuplă prismatică). Prima mișcare corespunde unei rotații în jurul axei<br />
verticale, cea de-a doua este tot o rotație dar în jurul axei x iar cea de-a treia mișcare este<br />
reprezentată de o translație în lungul axei y .<br />
Punctele din spațiul de lucru al robotului în care poate ajunge punctul caracteristic al efectorului final<br />
sunt incluse în volumul unei sfere de rază R (sau a unei porțiuni dintr-o sferă, Fig.1.15). Avantajele<br />
utilizării acestor structuri de roboți sunt următoarele: structură mecanică relativ simplă, compatibilitate<br />
bună cu alte echipamente, rezoluție bună datorată faptului că erorile din efectorul final sunt<br />
perpendiculare între ele. Dezavantajele sunt date de faptul că acești roboți prezintă posibilități limitate<br />
de evitare a obstacolelor și de faptul că eroarea de poziționare este destul de mare, este datorată<br />
mișcării de rotație a brațului și este proporțională cu raza descrisă de braț în mișcare de rotație.<br />
Complexitatea realizării comenzii cinematice constituie un alt dezavantaj important.<br />
Fig. 1.15 Reprezentarea structurii şi a volumului de lucru al unui robot în coordonate polare<br />
D. Roboţii articulaţi<br />
Acest tip de configurație mai este cunoscută în literatura de specialitate sub denumirea de<br />
configurație antropomorfă. Roboții de acest tip sunt alcătuiți în principal din trei cuple de rotație, după<br />
cum se poate observa și din Fig. 1.16. Volumul de lucru descris de efectorul final are o formă complexă<br />
care poate fi obținută dintr-o sferă. Se observă că spre deosebire de roboții în coordonate polare, acest<br />
tip de roboți prezintă un spațiu de lucru mai mare, fiind capabili de a efectua mișcări complexe. Datorită<br />
flexibilității structurii, roboții articulați sunt utilizați în special în cadrul proceselor de lucru în care accesul<br />
se face foarte greu. Precizia de poziționare a acestor structuri este foarte mare.<br />
34
