

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
. <strong>PRECIZIA</strong> ROBOȚILOR <strong>INDUSTRIALI</strong><br />
START<br />
Algoritmul<br />
MGD<br />
linT=0, colT=0<br />
lungmin = lungime ( Tn+<br />
1 0 [ 0][ 0]<br />
)<br />
l=0<br />
m=0<br />
min > ( n+<br />
1 0[<br />
][ ] ) T<br />
lung lungime l m<br />
True<br />
lungmin = lungime ( Tn+<br />
1 0[<br />
l][ m]<br />
)<br />
linT=l colT=m<br />
DA<br />
DA<br />
m++<br />
m ≤ 2<br />
l++<br />
l ≤ 2<br />
False<br />
Baza de date cu cele<br />
12 seturi de unghiuri<br />
i=0<br />
[ ] [ ]<br />
lin i ==linT &col i ==colT<br />
i++<br />
NU<br />
DA NU<br />
i ≤ 11<br />
DA<br />
NU<br />
1<br />
Output<br />
eroare de<br />
cautare<br />
1<br />
i==0<br />
i==1<br />
i==2<br />
i==3<br />
i==4<br />
i==5<br />
i==6<br />
2<br />
59<br />
NU<br />
NU<br />
NU<br />
NU<br />
NU<br />
NU<br />
NU<br />
DA<br />
DA<br />
DA<br />
DA<br />
DA<br />
DA<br />
DA<br />
STOP<br />
βy<br />
= Arcsin ( Tn+ 1 0 [ 0][ 2]<br />
)<br />
⎛ Tn+ 1 0 [ 1][ 2] αx<br />
= Atan2 ⎜ − ;<br />
⎜<br />
⎝<br />
cos( βy )<br />
Tn+<br />
1 0 [ 2][ 2]<br />
⎞<br />
⎟<br />
cos(<br />
βy<br />
) ⎟<br />
⎠<br />
⎛ Tn+ 1 0 [ 0][ 1]<br />
γ z = Atan2 ⎜ − ;<br />
⎜<br />
⎝<br />
cos( βy )<br />
Tn+<br />
1 0 [ 0][ 0]<br />
⎞<br />
⎟<br />
cos(<br />
βy<br />
) ⎟<br />
⎠<br />
βy<br />
= Arccos ( Tn+ 1 0 [ 0][ 0]<br />
)<br />
⎛Tn + 1 0 [ 0][ 1] αx<br />
= Atan2 ⎜ ;<br />
⎜<br />
⎝<br />
sin( βy )<br />
Tn+<br />
1 0 [ 0][<br />
2]<br />
⎞<br />
− ⎟<br />
sin(<br />
βy<br />
) ⎟<br />
⎠<br />
⎛Tn + 1 0 [ 0][ 1] γ x = Atan2 ⎜ ;<br />
⎜<br />
⎝<br />
sin( βy )<br />
Tn+<br />
1 0 [ 0][<br />
2]<br />
⎞<br />
⎟<br />
sin(<br />
βy<br />
) ⎟<br />
⎠<br />
βz<br />
= Arccos ( Tn+ 1 0 [ 0][ 0]<br />
)<br />
⎛Tn + 1 0 [ 0][ 2] αx<br />
= Atan2 ⎜ ;<br />
⎝ sin( βz )<br />
Tn+<br />
1 0 [ 0][<br />
1]<br />
⎞<br />
⎟<br />
sin(<br />
βz<br />
) ⎠<br />
⎛Tn + 1 0 [ 0][ 2] γ x = Atan2 ⎜ ;<br />
⎝ sin( βz )<br />
Tn+<br />
1 0 [ 0][<br />
1]<br />
⎞<br />
− ⎟<br />
sin(<br />
βz<br />
) ⎠<br />
βz<br />
= Arcsin ( −Tn<br />
+ 1 0 [ 0][ 1]<br />
)<br />
⎛Tn + 1 0 [ 2][ 1] αx<br />
= Atan2 ⎜ ;<br />
⎝ cos( βz )<br />
Tn+<br />
1 0 [ 1][ 1]<br />
⎞<br />
⎟<br />
cos(<br />
βz<br />
) ⎠<br />
⎛Tn + 1 0 [ 0][ 2]<br />
γ y = Atan2 ⎜ ;<br />
⎝ cos( βz )<br />
Tn+<br />
1 0 [ 0][ 0]<br />
⎞<br />
⎟<br />
cos(<br />
βz<br />
) ⎠<br />
βz<br />
= Arcsin ( Tn+ 1 0 [ 1][<br />
0]<br />
)<br />
⎛ Tn+ 1 0 [ 2][<br />
0] αy<br />
= Atan2 ⎜ − ;<br />
⎝ cos ( βz )<br />
Tn+<br />
1 0 [ 0][ 0]<br />
⎞<br />
⎟<br />
cos ( βz<br />
) ⎠<br />
⎛ Tn+ 1 0 [ 1][ 2] γ x = Atan2 ⎜ − ;<br />
⎝ cos ( βz )<br />
Tn+<br />
1 0 [ 1][ 1]<br />
⎞<br />
⎟<br />
cos(<br />
βz<br />
) ⎠<br />
βz<br />
= Arccos ( Tn+ 1 0 [ 1][ 1]<br />
)<br />
⎛Tn + 1 0 [ 2][ 1] αy<br />
= Atan2 ⎜ ;<br />
⎝ sin( βz )<br />
Tn+ 1 0 [ 0][<br />
1]<br />
⎞<br />
− ⎟<br />
sin(<br />
βz<br />
) ⎠<br />
⎛Tn + 1 0 [ 1][ 2] γ y = Atan2 ⎜ ;<br />
⎝ sin( βz )<br />
Tn+ 1 0 [ 1][<br />
0]<br />
⎞<br />
⎟<br />
sin(<br />
βz<br />
) ⎠<br />
βx<br />
= Arccos ( Tn+ 1 0 [ 1][ 1]<br />
)<br />
⎛Tn + 1 0 [ 0][ 1] αy<br />
= Atan2 ⎜ ;<br />
⎝ sin( βx )<br />
Tn+<br />
1 0 [ 2][ 1]<br />
⎞<br />
⎟<br />
sin(<br />
βx<br />
) ⎠<br />
⎛ Tn+ 1 0 [ 1][ 0]<br />
γ y = Atan2 ⎜ ;<br />
⎝ sin( βx )<br />
Tn+<br />
1 0 [ 1][ 2]<br />
⎞<br />
− ⎟<br />
sin(<br />
βx<br />
) ⎠<br />
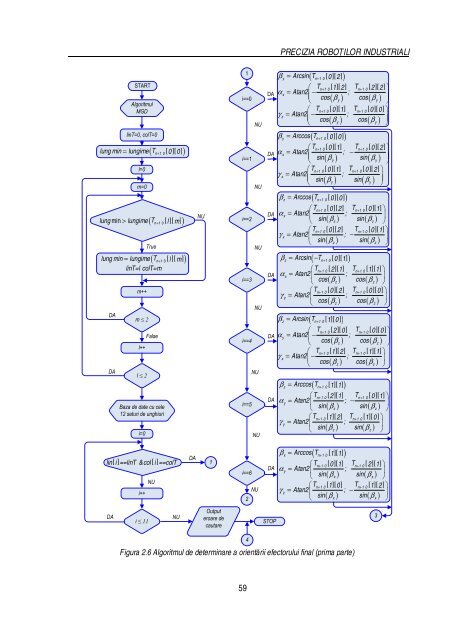
Figura 2.6 Algoritmul de determinare a orientării efectorului final (prima parte)<br />
4<br />
3
