

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3<br />
4<br />
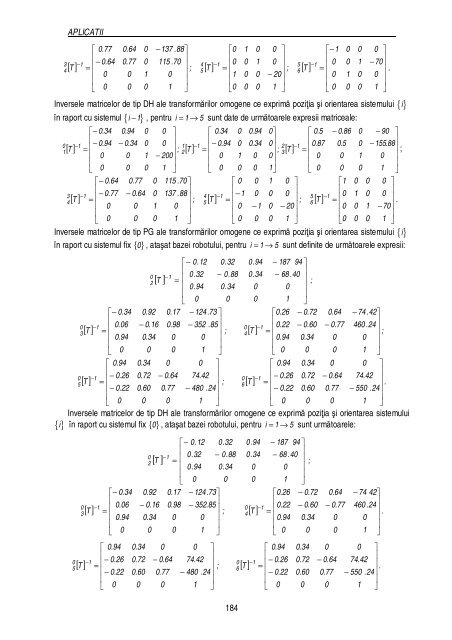
APLICATII<br />
⎡ 0.<br />
77<br />
⎢<br />
−0.<br />
64<br />
⎢ 0<br />
⎢<br />
⎣ 0<br />
0.<br />
64<br />
0.<br />
77<br />
−137<br />
. 88⎤<br />
115 . 70<br />
⎥<br />
0 ⎥<br />
⎥<br />
1 ⎦<br />
−1<br />
[ ] ⎢<br />
⎥ 4 −1<br />
=<br />
[ ] = ⎢<br />
⎥ 5<br />
T<br />
; T<br />
; [ T ]<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
5<br />
⎡0<br />
⎢<br />
0<br />
⎢1<br />
⎢<br />
⎣0<br />
184<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0 ⎤<br />
0<br />
⎥<br />
− 20⎥<br />
⎥<br />
1 ⎦<br />
6<br />
−1<br />
⎡−1<br />
⎢<br />
⎢<br />
0<br />
=<br />
⎢ 0<br />
⎢<br />
⎣ 0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0 ⎤<br />
−70<br />
⎥<br />
⎥ .<br />
0 ⎥<br />
⎥<br />
1 ⎦<br />
Inversele matricelor de tip DH ale transformărilor omogene ce exprimă poziţia şi orientarea sistemului { i }<br />
în raport cu sistemul { i − 1}<br />
, pentru i = 1 → 5 sunt date de următoarele expresii matriceale:<br />
⎡−<br />
0.<br />
34<br />
⎢<br />
0 −1<br />
[ ] ⎢<br />
−0.<br />
94<br />
1 T =<br />
⎢ 0<br />
⎢<br />
⎣ 0<br />
0.<br />
94<br />
− 0.<br />
34<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0 ⎤ ⎡ 0.<br />
34<br />
0<br />
⎥ ⎢<br />
⎥ 1 −1<br />
[ ] ⎢<br />
−0.<br />
94<br />
; 2 T =<br />
− 200⎥<br />
⎢ 0<br />
⎥ ⎢<br />
1 ⎦ ⎣ 0<br />
0<br />
0<br />
1<br />
0<br />
0.<br />
94<br />
0.<br />
34<br />
0<br />
0<br />
0⎤<br />
⎡ 0.<br />
5<br />
0<br />
⎥ ⎢<br />
⎥ 2 −1<br />
[ ] = ⎢<br />
0.<br />
87<br />
; 3 T<br />
0⎥<br />
⎢ 0<br />
⎥ ⎢<br />
1⎦<br />
⎣ 0<br />
−0.<br />
86<br />
0.<br />
5<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
−90<br />
⎤<br />
−155.<br />
88<br />
⎥<br />
⎥ ;<br />
0 ⎥<br />
⎥<br />
1 ⎦<br />
⎡−<br />
0.<br />
64<br />
⎢<br />
3 −1<br />
[ ] ⎢<br />
−0.<br />
77<br />
4 T =<br />
⎢ 0<br />
⎢<br />
⎣ 0<br />
0.<br />
77<br />
−0.<br />
64<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
115 . 70⎤<br />
137 . 88<br />
⎥<br />
⎥ ;<br />
0 ⎥<br />
⎥<br />
1 ⎦<br />
⎡ 0<br />
⎢<br />
4 −1<br />
[ ] ⎢<br />
−1<br />
5 T =<br />
⎢ 0<br />
⎢<br />
⎣ 0<br />
0<br />
0<br />
−1<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0 ⎤<br />
0<br />
⎥<br />
⎥ ;<br />
− 20⎥<br />
⎥<br />
1 ⎦<br />
⎡1<br />
⎢<br />
5 −1<br />
[ ] = ⎢<br />
0<br />
6 T<br />
⎢0<br />
⎢<br />
⎣0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0 ⎤<br />
0<br />
⎥<br />
⎥ .<br />
−70⎥<br />
⎥<br />
1 ⎦<br />
Inversele matricelor de tip PG ale transformărilor omogene ce exprimă poziţia şi orientarea sistemului { i }<br />
în raport cu sistemul fix { 0 } , ataşat bazei robotului, pentru i = 1 → 5 sunt definite de următoarele expresii:<br />
0.<br />
12<br />
0.<br />
32<br />
[ T ]<br />
0.<br />
94<br />
0<br />
0.<br />
32<br />
0.<br />
88<br />
0.<br />
34<br />
0<br />
0.<br />
94<br />
0.<br />
34<br />
0<br />
0<br />
187 94<br />
68.<br />
40<br />
;<br />
0<br />
1<br />
1 0<br />
⎡−<br />
⎢<br />
−<br />
2 = ⎢<br />
⎢<br />
⎢<br />
⎣<br />
−<br />
− ⎤<br />
−<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎡−<br />
0.<br />
34<br />
⎢<br />
0 −1<br />
0.<br />
06<br />
3[<br />
T ] = ⎢<br />
⎢ 0.<br />
94<br />
⎢<br />
⎣ 0<br />
0.<br />
92<br />
− 0.<br />
16<br />
0.<br />
34<br />
0<br />
0.<br />
17<br />
0.<br />
98<br />
0<br />
0<br />
−124<br />
. 73 ⎤<br />
− 352 . 85<br />
⎥<br />
⎥ ;<br />
0 ⎥<br />
⎥<br />
1 ⎦<br />
⎡0.<br />
26<br />
⎢<br />
0 −1<br />
0.<br />
22<br />
4[<br />
T ] = ⎢<br />
⎢0.<br />
94<br />
⎢<br />
⎣ 0<br />
− 0.<br />
72<br />
− 0.<br />
60<br />
0.<br />
34<br />
0<br />
0.<br />
64<br />
− 0.<br />
77<br />
0<br />
0<br />
−74<br />
. 42⎤<br />
460 . 24<br />
⎥<br />
⎥ ;<br />
0 ⎥<br />
⎥<br />
1 ⎦<br />
⎡ 0.<br />
94<br />
⎢<br />
0 −1<br />
0.<br />
26<br />
[ T ] ⎢<br />
−<br />
5 =<br />
⎢−<br />
0.<br />
22<br />
⎢<br />
⎣ 0<br />
0.<br />
34<br />
0.<br />
72<br />
0.<br />
60<br />
0<br />
0<br />
− 0.<br />
64<br />
0.<br />
77<br />
0<br />
0 ⎤<br />
74.<br />
42<br />
⎥<br />
⎥ ;<br />
− 480 . 24⎥<br />
⎥<br />
1 ⎦<br />
⎡ 0.<br />
94<br />
⎢<br />
0 −1<br />
0.<br />
26<br />
[ T ] ⎢<br />
−<br />
6 =<br />
⎢−<br />
0.<br />
22<br />
⎢<br />
⎣ 0<br />
0.<br />
34<br />
0.<br />
72<br />
0.<br />
60<br />
0<br />
0<br />
− 0.<br />
64<br />
0.<br />
77<br />
0<br />
0 ⎤<br />
74.<br />
42<br />
⎥<br />
⎥ .<br />
− 550 . 24⎥<br />
⎥<br />
1 ⎦<br />
i<br />
Inversele matricelor de tip DH ale transformărilor omogene ce exprimă poziţia şi orientarea sistemului<br />
în raport cu sistemul fix { 0 } , ataşat bazei robotului, pentru i = 1 → 5 sunt următoarele:<br />
{ }<br />
0<br />
5<br />
0<br />
3<br />
⎡−<br />
0.<br />
34<br />
⎢<br />
0.<br />
06<br />
⎢ 0.<br />
94<br />
⎢<br />
⎣ 0<br />
0<br />
2<br />
0.<br />
92<br />
− 0.<br />
16<br />
⎡−<br />
0.<br />
12 0.<br />
32<br />
⎢<br />
0.<br />
32 − 0.<br />
88<br />
⎢ 0.<br />
94<br />
⎢<br />
⎣ 0<br />
0.<br />
34<br />
0<br />
0.<br />
17<br />
0.<br />
98<br />
0<br />
0<br />
−124<br />
. 73⎤<br />
− 352.<br />
85<br />
⎥<br />
⎥ ;<br />
0 ⎥<br />
⎥<br />
1 ⎦<br />
0.<br />
94<br />
0.<br />
34<br />
[ T ] ;<br />
1 −<br />
= ⎢<br />
⎥<br />
0<br />
0<br />
− 187 94 ⎤<br />
− 68.<br />
40<br />
⎥<br />
0<br />
1<br />
⎥<br />
⎥<br />
⎦<br />
⎡0.<br />
26 − 0.<br />
72<br />
⎢<br />
0.<br />
22<br />
= ⎢<br />
⎢0.<br />
94<br />
⎢<br />
⎣ 0<br />
− 0.<br />
60<br />
0.<br />
34<br />
0<br />
0.<br />
64<br />
− 0.<br />
77<br />
−1<br />
[ T ] ⎢<br />
0 −1<br />
=<br />
[ T ] ⎥ .<br />
⎡ 0.<br />
94<br />
⎢<br />
− 0.<br />
26<br />
⎢−<br />
0.<br />
22<br />
⎢<br />
⎣ 0<br />
0.<br />
34<br />
0.<br />
72<br />
0.<br />
34<br />
0<br />
4<br />
⎡ 0.<br />
94<br />
⎢<br />
− 0.<br />
26<br />
⎢−<br />
0.<br />
22<br />
⎢<br />
⎣ 0<br />
0.<br />
72<br />
0<br />
0<br />
−74<br />
42⎤<br />
460 . 24<br />
⎥<br />
0 ⎥<br />
⎥<br />
1 ⎦<br />
−1<br />
[ T ] ⎢<br />
⎥ 0 −1<br />
=<br />
; [ T ] = ⎢<br />
⎥ .<br />
0.<br />
60<br />
0<br />
0<br />
− 0.<br />
64<br />
0.<br />
77<br />
0<br />
0 ⎤<br />
74.<br />
42<br />
⎥<br />
− 480 . 24⎥<br />
⎥<br />
1 ⎦<br />
6<br />
0.<br />
34<br />
0.<br />
60<br />
0<br />
0<br />
− 0.<br />
64<br />
0.<br />
77<br />
0<br />
0 ⎤<br />
74.<br />
42<br />
⎥<br />
− 550 . 24⎥<br />
⎥<br />
1 ⎦
