

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
MODELAREA ERORILOR CINEMATICE .I.<br />
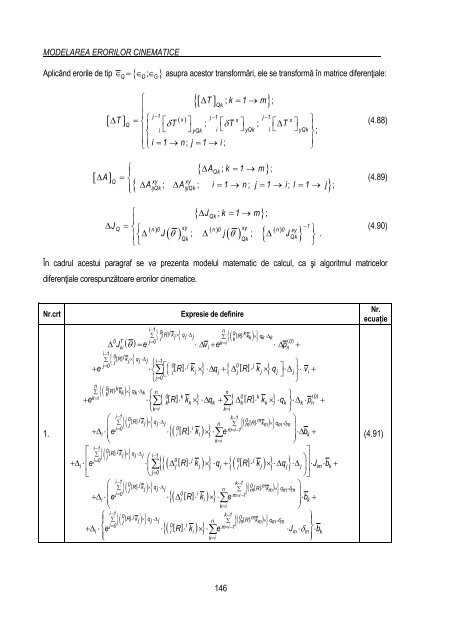
Aplicând erorile de tip ∈=∈ { ; ∈ } asupra acestor transformări, ele se transformă în matrice diferenţiale:<br />
[ A]<br />
[ ]<br />
Q D G<br />
{ [ T] k 1 m}<br />
⎧ Δ ; = → ;<br />
Qk<br />
⎪<br />
⎪ j−1 ( x )<br />
j−1 x<br />
j−1 Δ T = x<br />
Q ⎨⎧ ⎫<br />
⎪ ⎡δT ⎤ ; ⎡δT ⎤ ; ⎡ΔT ⎤ ⎪<br />
⎪⎨ i ⎣ ⎦ yQk i ⎣ ⎦ yQk i ⎣ ⎦ yQk ⎬;<br />
⎪⎪<br />
⎩i = 1→ n; j = 1→ i;<br />
⎪<br />
⎩<br />
⎭<br />
{ A k 1 m}<br />
⎧<br />
⎪<br />
Δ Qk ; = → ;<br />
Δ =<br />
Q ⎨ xy xy<br />
⎪⎩ { ΔAijQk ; Δ AijlQk ; i = 1 → n; j = 1 → i; l = 1 → j}<br />
;<br />
{ J k 1 m}<br />
⎧ Δ Qk ; = → ;<br />
⎪<br />
Δ J Q = ⎨⎧ ( ) xy 1<br />
( ) xy<br />
−<br />
n 0 n 0 ( n) 0 xy ⎫<br />
⎪⎨Δ J( θ ) ; Δ j( θ ) ; { Δ JQk}<br />
⎬ .<br />
Qk Qk<br />
⎩⎩<br />
⎭<br />
146<br />
(4.88)<br />
(4.89)<br />
(4.90)<br />
În cadrul acestui paragraf se va prezenta modelul matematic de calcul, ca şi algoritmul matricelor<br />
diferenţiale corespunzătoare erorilor cinematice.<br />
Nr.crt Expresie de definire<br />
1.<br />
i−1 0 { [ ] j<br />
n<br />
∑ R k 0 } { ( [ ] k<br />
j× qj⋅Δ j j ∑ R⋅ kk) × } qk⋅Δk<br />
0 T ( )<br />
( ) j= 0<br />
k<br />
0<br />
Δ J k i<br />
iv θ = e ⋅ Δ vi+ e =<br />
⋅ Δ pn+<br />
i−1 0 { [ R] j<br />
∑ kj× } q<br />
j<br />
j⋅Δj i−1 j= 0 ⎧ 0 { [ ] j 0 } { [ ] j ⎫<br />
+ e ⋅⎨∑⎡ j R kj qj j R kj } q ⎤<br />
⎣<br />
⋅ × ⋅Δ + Δ ⋅ × j ⎦<br />
⋅Δj⎬⋅ vi+<br />
⎩j= 0<br />
⎭<br />
n<br />
0 { ( [ R] k<br />
∑ ⋅ kk) × } q<br />
k k⋅Δk n n<br />
⎧ k i<br />
0 ( )<br />
{ [ ] k 0 } { [ ] k ⎫ 0<br />
+ e =<br />
⋅⎨∑ k R ⋅ kk× ⋅Δ qk + ∑ Δk R ⋅ kk× } ⋅qk ⎬⋅Δk⋅<br />
pn<br />
+<br />
⎩k= i k= i<br />
⎭<br />
⎛ i−1 0 { ( [ ] j k−1 ∑ R⋅ k ) }<br />
{ ( 0 [ ] m<br />
j × qj⋅Δ ) ⎞<br />
j<br />
j n ∑ m R⋅ km × } qm⋅δ<br />
⎜ m<br />
j= 0 0<br />
+Δ<br />
{ ( [ ] i )<br />
m i 1<br />
i e i R ki } e =−<br />
⎟<br />
⋅⎜ ⋅ ⋅ × ⋅∑ ⎟⋅Δ<br />
bk+<br />
⎝ k= i<br />
⎠<br />
i−1 ⎡ 0 { ( [ R] j<br />
∑ ⋅ kj) × } q<br />
j<br />
j⋅Δ ⎤<br />
j i−1 ⎢ j= 0<br />
⎛ 0 { { ( [ ] j 0 ) } { ( [ ] j<br />
⎞⎥<br />
i ⎢<br />
e ⎜∑j R kj qj j R kj) } qj} j⎟⎥ Jim bk<br />
⎣ ⎝ j= 0<br />
⎠⎦<br />
i−1 ⎛ 0 { ( [ R] ⋅<br />
j k−1 ∑ k 0 ) } q [ R] m<br />
j j × j⋅Δj ( m ⋅ k ) ⎞<br />
n ∑ { m × } qm⋅δ<br />
⎜ m<br />
j= 0<br />
0 { ( [ ] i<br />
+Δi⋅e ⋅ Δi R ⋅ ki) × } ⋅ em=−<br />
i 1<br />
⎟<br />
⎜ ∑<br />
⎟⋅<br />
bk<br />
+<br />
⎝ k= i<br />
⎠<br />
i−1 ⎧ 0 k 1<br />
{ ( [ R] j −<br />
k ) } q { ( 0 [ R] m<br />
⎪ ∑ ⋅<br />
j j × j⋅Δj n m km) ⎫<br />
∑ ⋅ × } qm⋅δm<br />
⎪<br />
j= 0 0 { ( [ ] i<br />
+Δ )<br />
m i 1<br />
i⋅⎨e ⋅ i R ⋅ ki × } ⋅ e =− ∑<br />
⋅Jm⋅δ⎬ m ⋅bk<br />
⎪ k= i<br />
⎪<br />
+Δ ⋅ ⋅ Δ ⋅ × ⋅ + ⋅ × ⋅Δ ⋅Δ ⋅ ⋅ +<br />
⎩ ⎭<br />
Nr.<br />
ecuație<br />
(4.91)
