

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
xy<br />
Q<br />
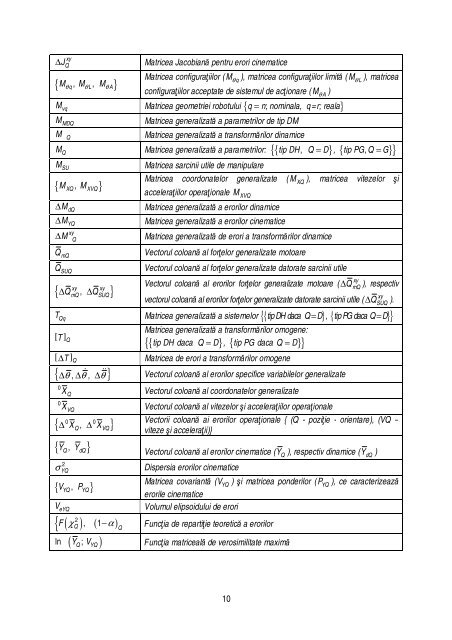
Δ J<br />
Matricea Jacobiană pentru erori cinematice<br />
{ Mθ q, Mθ L, Mθ<br />
A}<br />
vq<br />
Matricea configuraţiilor ( q Mθ ), matricea configuraţiilor limită ( L Mθ configuraţiilor acceptate de sistemul de acţionare ( A Mθ )<br />
M Matricea geometriei robotului { q = n; nominala, q=r; reala}<br />
M MDQ<br />
Matricea generalizată a parametrilor de tip DM<br />
M ‹ Q<br />
Q<br />
Matricea generalizată a transformărilor dinamice<br />
10<br />
), matricea<br />
{ }<br />
M Matricea generalizată a parametrilor: { tip DH, Q = D } , { tip PG, Q = G}<br />
M SU<br />
Matricea sarcinii utile de manipulare<br />
{ MXQ , M XVQ}<br />
Matricea coordonatelor generalizate ( M XQ ), matricea vitezelor şi<br />
acceleraţiilor operaţionale M XVQ<br />
Δ MdQ<br />
Matricea generalizată a erorilor dinamice<br />
Δ M<br />
Matricea generalizată a erorilor cinematice<br />
YQ<br />
xy<br />
Q<br />
Δ M‹<br />
Matricea generalizată de erori a transformărilor dinamice<br />
Q mQ<br />
Vectorul coloană al forţelor generalizate motoare<br />
Q SUQ<br />
Vectorul coloană al forţelor generalizate datorate sarcinii utile<br />
xy xy<br />
{ ΔQ , Δ Q }<br />
Qq<br />
mQ SUQ<br />
Vectorul coloană al erorilor forţelor generalizate motoare ( Δ Q ), respectiv<br />
vectorul coloană al erorilor forţelor generalizate datorate sarcinii utile ( Δ Q ).<br />
T Matricea generalizată a sistemelor { tipDH daca Q = D } , { tipPG daca Q = D}<br />
[ T ] Q<br />
Matricea generalizată a transformărilor omogene:<br />
tip DH daca Q = D , tip PG daca Q = D<br />
{ { } { } }<br />
[ Δ T ] Q<br />
Matricea de erori a transformărilor omogene<br />
{ Δθ , Δθ , Δθ<br />
}<br />
0<br />
0<br />
Q<br />
xy<br />
mQ<br />
xy<br />
SUQ<br />
{ }<br />
ɺ ɺɺ Vectorul coloană al erorilor specifice variabilelor generalizate<br />
X Vectorul coloană al coordonatelor generalizate<br />
X Vectorul coloană al vitezelor şi acceleraţiilor operaţionale<br />
VQ<br />
0 0 { Δ X , Δ X }<br />
Q VQ<br />
{ Y , Y }<br />
Q dQ<br />
Vectorii coloană ai erorilor operaţionale { (Q - poziţie - orientare), (VQ –<br />
viteze şi acceleraţii)}<br />
Vectorul coloană al erorilor cinematice ( Y Q ), respectiv dinamice ( Y dQ )<br />
2<br />
σ YQ<br />
Dispersia erorilor cinematice<br />
{ VYQ , P YQ}<br />
Matricea covariantă ( V YQ ) şi matricea ponderilor ( P YQ ), ce caracterizează<br />
erorile cinematice<br />
V Volumul elipsoidului de erori<br />
eYQ<br />
2 { F ( χQ ) , ( 1 α ) Q<br />
( YQ VYQ<br />
)<br />
− Funcţia de repartiţie teoretică a erorilor<br />
ln ‹ ;<br />
Funcţia matriceală de verosimilitate maximă
