

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
link i −1<br />
q ⋅k<br />
i−1 i−1<br />
{ i −1}<br />
4. MODELAREA ERORILOR CINEMATICE<br />
4.1 Matricele erorilor cinematice<br />
Modelarea cinematico-dinamică nominală a roboţilor se bazează, printre altele, pe aşa numitele<br />
matrice diferenţiale ale transformărilor omogene având ca variabile q = q ( t) ; i = 1→ n .<br />
qi⋅ki { i}<br />
{ 0}<br />
link i<br />
{ i + 1}<br />
q ⋅k<br />
i+ 1 i+<br />
1<br />
qn⋅kn { n}<br />
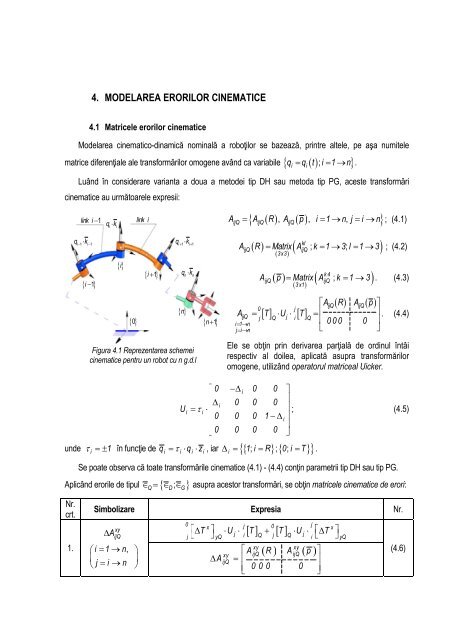
Figura 4.1 Reprezentarea schemei<br />
cinematice pentru un robot cu n g.d.l<br />
{ n+ 1}<br />
{ i i<br />
}<br />
Luând în considerare varianta a doua a metodei tip DH sau metoda tip PG, aceste transformări<br />
cinematice au următoarele expresii:<br />
unde i 1<br />
U<br />
{ ( ) , ( ) , , }<br />
A = A R A p i = 1→ n j = i → n ; (4.1)<br />
ijQ ijQ ijQ<br />
( )<br />
kl ( )<br />
AijQ R = Matrix AijQ ; k = 1→ 3; l = 1→ 3 ; (4.2)<br />
( 3x3)<br />
( )<br />
k4 ( ; )<br />
( 3x1)<br />
A p = Matrix A k = 1→ 3 . (4.3)<br />
ijQ ijQ<br />
0 j<br />
AijQ T U<br />
j Q j T<br />
i Q<br />
i=→ 1 n<br />
j=→ i n<br />
( ) ( )<br />
⎡AijQ R AijQ p ⎤<br />
= [ ] ⋅ ⋅ [ ] = ⎢ ⎥.<br />
(4.4)<br />
⎢ 000 0 ⎥<br />
⎣ ⎦<br />
Ele se obţin prin derivarea parţială de ordinul întâi<br />
respectiv al doilea, aplicată asupra transformărilor<br />
omogene, utilizând operatorul matriceal Uicker.<br />
⎡ 0 −Δi<br />
0 0 ⎤<br />
⎢<br />
Δ i 0 0 0<br />
⎥<br />
= τ ⋅⎢ ⎥ ;<br />
⎢ 0 0 0 1−Δi⎥<br />
⎢ ⎥<br />
⎣ 0 0 0 0 ⎦<br />
i i<br />
{ }<br />
τ =± în funcţie de qi = τ i ⋅qi ⋅ zi<br />
, iar Δ i = { 1; i= R} ; { 0; i= T}<br />
.<br />
Se poate observa că toate transformările cinematice (4.1) - (4.4) conţin parametrii tip DH sau tip PG.<br />
Aplicând erorile de tipul ∈=∈ { ; ∈ } asupra acestor transformări, se obţin matricele cinematice de erori:<br />
Nr.<br />
crt.<br />
Q D G<br />
Simbolizare Expresia Nr.<br />
ΔA<br />
xy<br />
ijQ<br />
1. ⎛i = 1→ n,<br />
⎞<br />
⎜ ⎟<br />
⎝ j = i → n ⎠<br />
0<br />
x j 0<br />
j<br />
x<br />
⎡ T ⎤ U j T T U ⎡<br />
i Q j Q j T ⎤<br />
j ⎣<br />
Δ<br />
⎦<br />
⋅ ⋅ + ⋅ ⋅ Δ<br />
yQ i ⎣ ⎦yQ<br />
[ ] [ ]<br />
xy<br />
A ( R) xy<br />
A ( p)<br />
⎡ ⎤<br />
xy<br />
ijQ ijQ<br />
Δ A ijQ = ⎢ ⎥<br />
⎢⎣ 000 0 ⎥⎦<br />
(4.5)<br />
(4.6)
