

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
35<br />
<strong>PRECIZIA</strong> ROBOȚILOR <strong>INDUSTRIALI</strong><br />
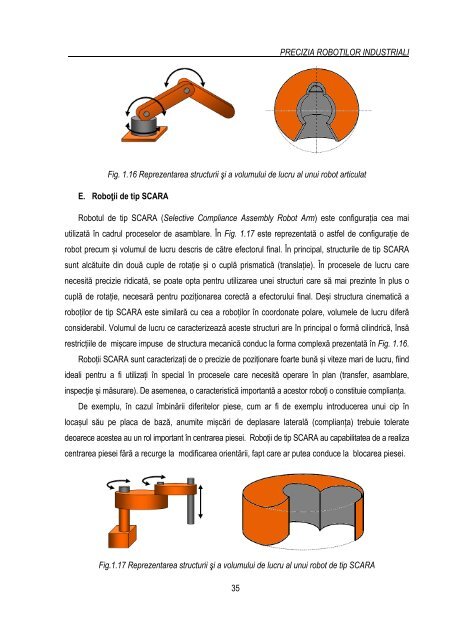
Fig. 1.16 Reprezentarea structurii şi a volumului de lucru al unui robot articulat<br />
E. Roboţii de tip SCARA<br />
Robotul de tip SCARA (Selective Compliance Assembly Robot Arm) este configurația cea mai<br />
utilizată în cadrul proceselor de asamblare. În Fig. 1.17 este reprezentată o astfel de configurație de<br />
robot precum și volumul de lucru descris de către efectorul final. În principal, structurile de tip SCARA<br />
sunt alcătuite din două cuple de rotație și o cuplă prismatică (translație). În procesele de lucru care<br />
necesită precizie ridicată, se poate opta pentru utilizarea unei structuri care să mai prezinte în plus o<br />
cuplă de rotație, necesară pentru poziționarea corectă a efectorului final. Deși structura cinematică a<br />
roboților de tip SCARA este similară cu cea a roboților în coordonate polare, volumele de lucru diferă<br />
considerabil. Volumul de lucru ce caracterizează aceste structuri are în principal o formă cilindrică, însă<br />
restricțiile de mișcare impuse de structura mecanică conduc la forma complexă prezentată în Fig. 1.16.<br />
Roboții SCARA sunt caracterizați de o precizie de poziționare foarte bună și viteze mari de lucru, fiind<br />
ideali pentru a fi utilizați în special în procesele care necesită operare în plan (transfer, asamblare,<br />
inspecție și măsurare). De asemenea, o caracteristică importantă a acestor roboți o constituie complianța.<br />
De exemplu, în cazul îmbinării diferitelor piese, cum ar fi de exemplu introducerea unui cip în<br />
locașul său pe placa de bază, anumite mișcări de deplasare laterală (complianța) trebuie tolerate<br />
deoarece acestea au un rol important în centrarea piesei. Roboții de tip SCARA au capabilitatea de a realiza<br />
centrarea piesei fără a recurge la modificarea orientării, fapt care ar putea conduce la blocarea piesei.<br />
Fig.1.17 Reprezentarea structurii şi a volumului de lucru al unui robot de tip SCARA
