

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3. CONTRIBUȚII LA MODELAREA ERORILOR GEOMETRICE<br />
3.1 Matricele datelor de intrare<br />
Prima și cea mai importantă etapă în modelarea preciziei cinematice a erorilor constă în<br />
determinarea matricelor datelor de intrare, denumite și matricele geometriei robotului, stabilite încă din<br />
faza de proiectare respectiv de simulare a comportamentului structurii mecanice supusă studiului.<br />
Considerând o structură mecanică de robot, cu n grade de liberate, pentru fiecare element<br />
aparținând structurii mecanice nominale, respectiv reale (cu erori) se stabilesc următorii parametrii:<br />
coordonatele centrului geometric al fiecărei cuple motoare, notat cu O i , precum și poziția unui punct<br />
oarecare i A ales pe axa cinematică k i , ambele poziții fiind considerate în raport cu sistemul de<br />
referință fix, atașat bazei robotului, notat cu { }<br />
0<br />
i<br />
Paşii care trebuie urmaţi in determinarea matricelor datelor de intrare sunt următorii:<br />
1. Se precizează tipul robotului. Denumire şi simbol<br />
2. Se fac următoarele notaţii: n reprezintă numărul gradelor de libertate (numărul elementelor<br />
mobile sau numărul cuplelor cinematice motoare),<br />
3. Cu m se notează numărul configuraţiilor distinct ale robotului<br />
4. Geometria robotului pentru m = 1<br />
ij<br />
M vn<br />
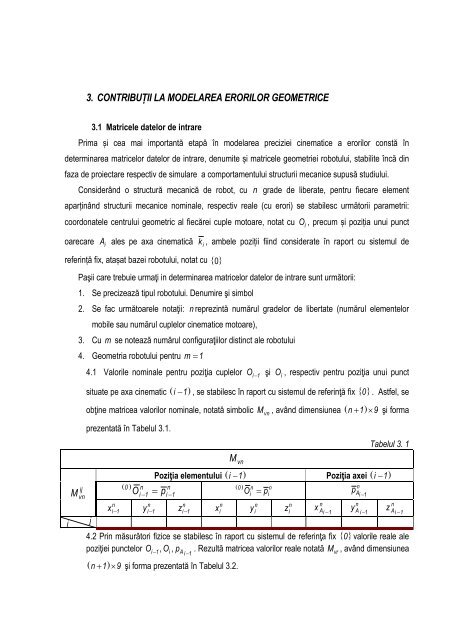
4.1 Valorile nominale pentru poziţia cuplelor Oi− 1 şi O i , respectiv pentru poziţia unui punct<br />
situate pe axa cinematic ( i− 1)<br />
, se stabilesc în raport cu sistemul de referinţă fix { 0 } . Astfel, se<br />
obţine matricea valorilor nominale, notată simbolic vn M , având dimensiunea ( n+ 1) × 9 şi forma<br />
prezentată în Tabelul 3.1.<br />
j<br />
( 0) n<br />
Oi−1 n<br />
= pi−1<br />
n<br />
xi− 1<br />
n<br />
y i− 1<br />
n<br />
zi− 1<br />
M vn<br />
Tabelul 3. 1<br />
Poziţia elementului ( i− 1)<br />
Poziţia axei ( i− 1)<br />
n<br />
x i<br />
( 0) n n<br />
Oi = pi<br />
n<br />
y i<br />
n<br />
z i<br />
n<br />
x Ai− 1<br />
n<br />
pAi− 1<br />
n<br />
y A i− 1<br />
n<br />
z Ai− 1<br />
4.2 Prin măsurători fizice se stabilesc în raport cu sistemul de referinţa fix { 0} valorile reale ale<br />
poziţiei punctelor O , O , p<br />
M , având dimensiunea<br />
i−1 i Ai− 1<br />
. Rezultă matricea valorilor reale notată vr<br />
( n+ 1) × 9 şi forma prezentată în Tabelul 3.2.
