

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
i<br />
i<br />
i<br />
ij<br />
T n<br />
ij<br />
M Gn<br />
ij<br />
T r<br />
4.3.13 Orientarea axei<br />
q<br />
x i devine:<br />
{ ( i+ 1 ) ( i+ 1 ) }<br />
q<br />
xi= ⎡<br />
⎣<br />
q<br />
p<br />
q<br />
− pi q<br />
p<br />
q<br />
− pi ⎤ q<br />
⎦<br />
× zi q<br />
sα q<br />
= ⎡⎣ cαix q<br />
cβix q<br />
cγ<br />
⎤ ix ⎦ . (3.4)<br />
q<br />
4.3.14 Orientarea axei y i se determină prin intermediul următoarei expresii:<br />
q<br />
yi q q<br />
= zi × xi q<br />
= ⎡<br />
⎣<br />
cαiy q<br />
cβiy q<br />
T<br />
cγ<br />
⎤<br />
iy⎦<br />
. (3.5)<br />
4.3.15 Dacă i = n+<br />
1,<br />
urmează pasul 4.3.16. În caz contrar, i = i+<br />
1 și se revine la 4.3.3.<br />
4.3.16 Dacă q = n,<br />
urmează pasul 4.3.17. În caz contrar, q = r și se trece la pasul 4.3.21.<br />
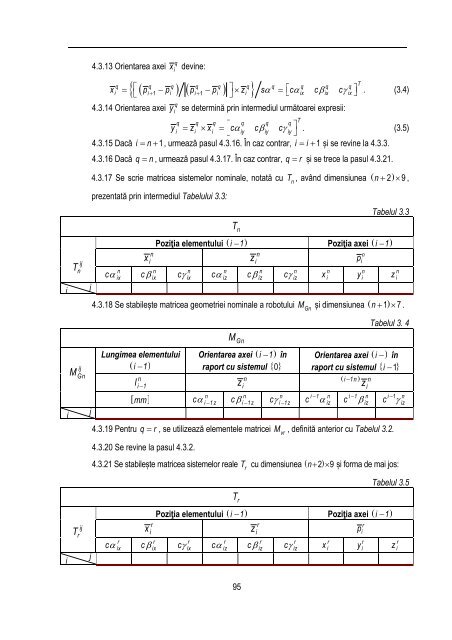
4.3.17 Se scrie matricea sistemelor nominale, notată cu T n , având dimensiunea ( n + 2) × 9,<br />
j<br />
j<br />
j<br />
prezentată prin intermediul Tabelului 3.3:<br />
n<br />
cα ix<br />
n<br />
x i<br />
n<br />
cβ ix<br />
T n<br />
95<br />
T<br />
.<br />
Tabelul 3.3<br />
Poziţia elementului ( i− 1)<br />
Poziţia axei ( i− 1)<br />
n<br />
cγ ix<br />
n<br />
cα iz<br />
n<br />
z i<br />
n<br />
cβ iz<br />
n<br />
cγ iz<br />
4.3.18 Se stabilește matricea geometriei nominale a robotului M Gn și dimensiunea ( n + 1) × 7.<br />
Tabelul 3. 4<br />
Lungimea elementului<br />
( i− 1)<br />
n<br />
l i− 1<br />
[ ]<br />
mm<br />
M Gn<br />
Orientarea axei ( i− 1)<br />
în<br />
raport cu sistemul { 0 }<br />
n<br />
cα i− 1z<br />
n<br />
z i<br />
n<br />
cβ i− 1z<br />
n<br />
cγ i− 1z<br />
n<br />
x i<br />
n<br />
p i<br />
n<br />
y i<br />
n<br />
z i<br />
Orientarea axei ( i − ) în<br />
raport cu sistemul { i − 1}<br />
( i−1n) n<br />
z<br />
i−1 n<br />
iz<br />
c α<br />
i<br />
i−1 n<br />
iz<br />
c β<br />
4.3.19 Pentru q = r , se utilizează elementele matricei M vr , definită anterior cu Tabelul 3.2.<br />
4.3.20 Se revine la pasul 4.3.2.<br />
i−1 n<br />
iz<br />
c γ<br />
4.3.21 Se stabilește matricea sistemelor reale r T cu dimensiunea ( n+ 2) × 9 și forma de mai jos:<br />
r<br />
cα ix<br />
r<br />
x i<br />
r<br />
cβ ix<br />
T r<br />
Tabelul 3.5<br />
Poziţia elementului ( i− 1)<br />
Poziţia axei ( i− 1)<br />
r<br />
cγ ix<br />
r<br />
cα iz<br />
r<br />
z i<br />
r<br />
cβ iz<br />
r<br />
cγ iz<br />
r<br />
x i<br />
r<br />
p i<br />
r<br />
y i<br />
r<br />
z i
