

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>PRECIZIA</strong> ROBOȚILOR <strong>INDUSTRIALI</strong> .<br />
.<br />
⎧Δ<br />
i−1 nT i−1 r<br />
α x = −( y i ⋅ zi<br />
)<br />
⎪ i−1 nT i−1 r<br />
⎨Δ<br />
βy<br />
= xi ⋅ zi<br />
;<br />
(3.80)<br />
⎪ i−1 nT i−1 r<br />
⎪⎩<br />
Δ γ z =−( xi ⋅ yi<br />
)<br />
Pentru verificare, se mai pot scrie următoarele identităţi:<br />
i−1 nT i−1 r<br />
⎧Δ αx+Δβy ⋅Δ γz<br />
= zi ⋅ y i<br />
⎪ i−1 nT i−1 r<br />
⎨Δγ<br />
z ⋅Δαx −Δ βy<br />
= zi ⋅ xi<br />
(3.81)<br />
⎪<br />
i−1 nT i−1 r<br />
⎪Δ ⎩ αx⋅Δ βy +Δ γz<br />
= y i ⋅ xi<br />
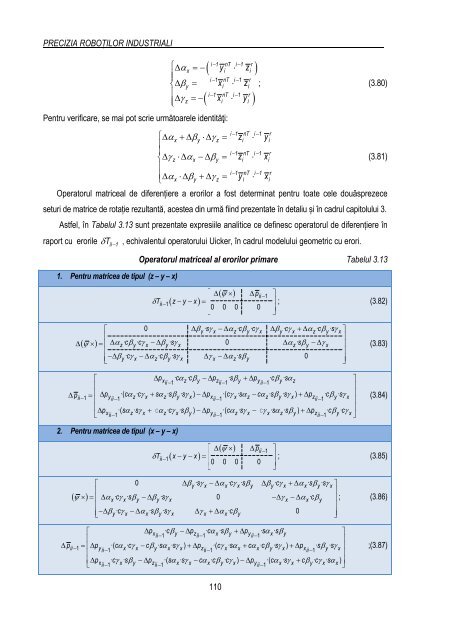
Operatorul matriceal de diferențiere a erorilor a fost determinat pentru toate cele douăsprezece<br />
seturi de matrice de rotație rezultantă, acestea din urmă fiind prezentate în detaliu și în cadrul capitolului 3.<br />
Astfel, în Tabelul 3.13 sunt prezentate expresiile analitice ce definesc operatorul de diferențiere în<br />
raport cu erorile δTii− 1 , echivalentul operatorului Uicker, în cadrul modelului geometric cu erori.<br />
1. Pentru matricea de tipul (z – y – x)<br />
Operatorul matriceal al erorilor primare Tabelul 3.13<br />
110<br />
( ψ )<br />
⎡ Δ × Δ pii<br />
−1<br />
⎤<br />
δTii−1 ( z− y − x)<br />
= ⎢ ⎥<br />
⎢0 0 0 0 ⎥<br />
⎣ ⎦<br />
; (3.82)<br />
⎡ 0<br />
Δβy· sγ x −Δαz· cβy· cγ x Δ βy· cγ x +Δαz·<br />
cβy· sγ<br />
x⎤<br />
⎢ ⎥<br />
Δ ( ψ × ) = ⎢ Δαz· cβy· cγ x −Δβy· sγ x 0<br />
Δαz· sβy<br />
−Δγ<br />
x ⎥<br />
⎢ ⎥<br />
⎢−Δβy· cγ x −Δαz· cβy· sγ x Δγ x −Δαz·<br />
sβy<br />
0<br />
⎣ ⎥⎦<br />
⎡ Δpx · cα 1 z· cβy −Δ pz · sβ · ·<br />
1 y +Δpy<br />
cβ 1 y sαz<br />
⎤<br />
ii− ii− ii−<br />
⎢ ⎥<br />
Δ p p ·( · · · ) ·( · · · ) · ·<br />
1 y cα 1 z cγ x sα ii ii z sβy sγ x px cγ ii 1 x sαz cαz sβy sγ x pz cβ ii 1 y sγ<br />
− = ⎢ Δ + −Δ − +Δ<br />
⎥<br />
x<br />
⎢ − − − ⎥<br />
⎢Δ px ·( sα · c · · ) ·( · c · · ) · ·<br />
ii 1 z sγ x + αz cγ x sβy −Δpy cα ii 1 z sγ x − γ x sαz sβy +Δpz cβ ii 1 y cγ⎥<br />
⎣ − − −<br />
x ⎦<br />
2. Pentru matricea de tipul (x – y – x)<br />
( ψ )<br />
( ψ )<br />
⎡ Δ × Δ pii<br />
−1<br />
⎤<br />
δTii−1 ( x− y − x)<br />
= ⎢ ⎥<br />
⎢0 0 0 0 ⎥<br />
⎣ ⎦<br />
(3.83)<br />
(3.84)<br />
; (3.85)<br />
⎡ 0<br />
Δβy· sγ x −Δαx· cγ x· sβy Δ βy· cγ x +Δαx·<br />
sβy· sγ<br />
x⎤<br />
⎢ ⎥<br />
× =⎢ Δαx· cγ x· sβy −Δβy· sγ x 0<br />
−Δγ x −Δαx·<br />
cβy<br />
⎥ ; (3.86)<br />
⎢ ⎥<br />
⎢⎣ −Δβy· cγ x − Δαx· sβy· sγ x Δ γ x + Δαx·<br />
cβy<br />
0 ⎥⎦<br />
⎡ Δpx · cβ 1 y −Δ pz · cα · · ·<br />
1 x sβy +Δpy<br />
sα 1 x sβy<br />
⎤<br />
ii− ii− ii−<br />
⎢ ⎥<br />
Δ pii−1 = ⎢Δpy·( cα· · · ) ·( · · · ) · ·<br />
ii 1 x cγ x − cβysαxsγ x +Δ pz cγ ii 1 x sαx+ cαxcβysγ x +Δpxsβ<br />
ii 1 y sγ<br />
x ⎥<br />
− − −<br />
⎢ ⎥<br />
⎢Δpx· cγ · ·( · · · ) ·( · · · )<br />
ii 1 x sβy −Δpz sα ii 1 x sγ x −cαx cβy cγ x −Δ py cα ii 1 x sγ x + cβy cγ x sα<br />
− − −<br />
x ⎥<br />
⎣ ⎦<br />
;(3.87)
