

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
q ⋅k<br />
i−1 i−1<br />
2. ALGORITMI DE CALCUL ÎN CINEMATICA ȘI DINAMICA ROBOȚILOR<br />
2.1 Algoritmi utilizați în modelarea geometrică directă a structurilor de roboți<br />
Roboţii industriali sunt structuri mecanice complexe, cu funcționare automată, concepute special<br />
pentru îndeplinirea funcţiilor de manipulare şi de comandă, în cadrul diferitelor procese de lucru. Faţă de<br />
mijloacele clasice de automatizare, aceste structuri prezintă avantajul de a se adapta extrem de rapid la<br />
noile cerinţe ale procesului în care sunt utilizați. Acest avantaj important, precum și gama largă de<br />
aplicații în care pot fi implementați (universalitatea), au determinat creșterea productivității și în paralel<br />
scăderea cheltuielilor de fabricație, fapt evident în cazul producţiei de serie mică şi mijlocie, unde aceste<br />
sisteme sunt utilizate. Structura mecanică a roboţilor industriali constă dintr-o serie de elemente<br />
mecanice (considerate rigide), conectate între ele prin intermediul cuplelor cinematice. În construcția<br />
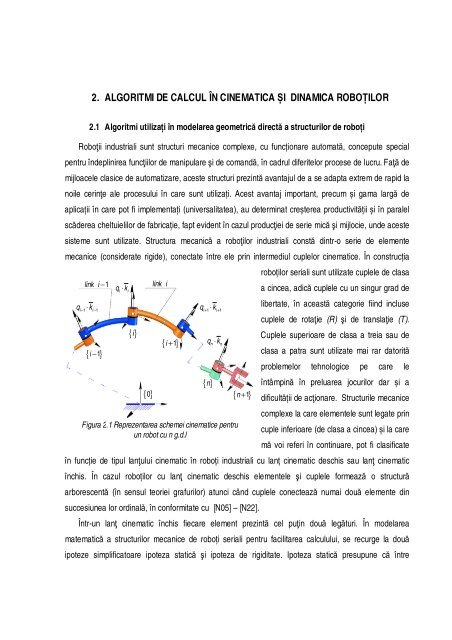
link i −1 link i<br />
q ⋅k<br />
{ i −1}<br />
i i<br />
{ i}<br />
{ 0}<br />
{ i + 1}<br />
q ⋅k<br />
i+ 1 i+<br />
1<br />
qn ⋅kn<br />
{ n}<br />
Figura 2.1 Reprezentarea schemei cinematice pentru<br />
un robot cu n g.d.l<br />
{ n+ 1}<br />
roboților seriali sunt utilizate cuplele de clasa<br />
a cincea, adică cuplele cu un singur grad de<br />
libertate, în această categorie fiind incluse<br />
cuplele de rotaţie (R) şi de translaţie (T).<br />
Cuplele superioare de clasa a treia sau de<br />
clasa a patra sunt utilizate mai rar datorită<br />
problemelor tehnologice pe care le<br />
întâmpină în preluarea jocurilor dar și a<br />
dificultății de acţionare. Structurile mecanice<br />
complexe la care elementele sunt legate prin<br />
cuple inferioare (de clasa a cincea) și la care<br />
mă voi referi în continuare, pot fi clasificate<br />
în funcție de tipul lanţului cinematic în roboți industriali cu lanț cinematic deschis sau lanţ cinematic<br />
închis. În cazul roboților cu lanţ cinematic deschis elementele şi cuplele formează o structură<br />
arborescentă (în sensul teoriei grafurilor) atunci când cuplele conectează numai două elemente din<br />
succesiunea lor ordinală, în conformitate cu [N05] – [N22].<br />
Într-un lanţ cinematic închis fiecare element prezintă cel puţin două legături. În modelarea<br />
matematică a structurilor mecanice de roboți seriali pentru facilitarea calculului, se recurge la două<br />
ipoteze simplificatoare ipoteza statică şi ipoteza de rigiditate. Ipoteza statică presupune că între
