

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
ALGORITMI DE CALCUL ÎN CINEMATICA ȘI DINAMICA ROBOȚILOR .<br />
( 0) ( 0)<br />
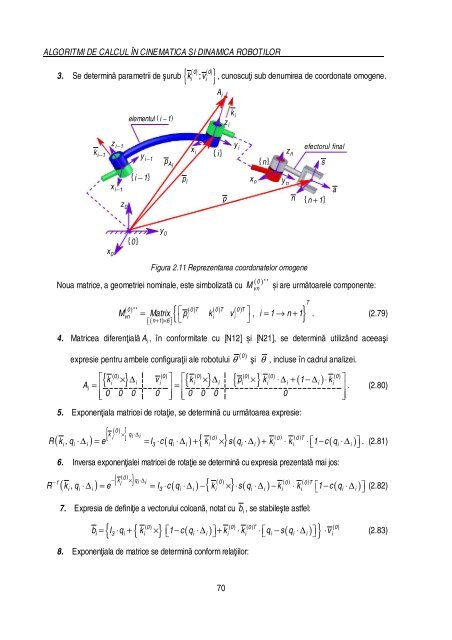
3. Se determină parametrii de şurub { ki ; v i } , cunoscuţi sub denumirea de coordonate omogene.<br />
ki−1 x0<br />
zi −1<br />
xi−1 z0<br />
elementul ( i −1)<br />
{ }<br />
0<br />
yi −1<br />
{ i −1}<br />
pAi<br />
Figura 2.11 Reprezentarea coordonatelor omogene<br />
Noua matrice, a geometriei nominale, este simbolizată cu M și are următoarele componente:<br />
70<br />
( 0 )**<br />
vn<br />
{ }<br />
( 0)<br />
**<br />
( 0) T ( 0) T ( 0) T<br />
Mvn = Matrix ⎡pi ki v ⎤<br />
i , i = 1 → n + 1<br />
⎡( n+ 1) × 6⎤<br />
⎣ ⎦<br />
⎣ ⎦<br />
T<br />
. (2.79)<br />
4. Matricea diferenţială A i , în conformitate cu [N12] și [N21], se determină utilizând aceeaşi<br />
( 0)<br />
expresie pentru ambele configuraţii ale robotului θ şi θ , incluse în cadrul analizei.<br />
{ } i { } i { } i ( i )<br />
⎡ ( 0) ( 0) ( 0) ( 0) ( 0) ( 0)<br />
ki × Δ v ⎤ ⎡<br />
i ki × Δ pi × ki ⋅Δ + 1− Δ ⋅k<br />
⎤<br />
i<br />
Ai<br />
= ⎢ ⎥ = ⎢ ⎥ . (2.80)<br />
⎢⎣ 0 0 0 0 ⎥⎦ ⎢⎣ 0 0 0 0<br />
⎥⎦<br />
5. Exponenţiala matricei de rotaţie, se determină cu următoarea expresie:<br />
( 0)<br />
( ) { k × } qi ⋅Δ<br />
i i<br />
( 0) ( 0) ( 0) T<br />
R ki , qi ⋅Δ i = e = I3 ⋅c( qi ⋅Δ i ) + { ki × } s( qi ⋅ Δ i ) + ki ⋅ ki ⋅ ⎡⎣ 1− c( qi<br />
⋅ Δi<br />
) ⎤⎦<br />
. (2.81)<br />
6. Inversa exponenţialei matricei de rotaţie se determină cu expresia prezentată mai jos:<br />
( 0)<br />
−1<br />
−<br />
( )<br />
{ k × } qi ⋅Δ<br />
( 0)<br />
( ) ( )<br />
,<br />
i i<br />
0 0 T<br />
i i ⋅Δ i = = 3 ⋅ ( i ⋅Δ i ) − { i × } ⋅ ( i ⋅Δ i ) − i ⋅ i − i ⋅Δ i<br />
( )<br />
R k q e I c q k s q k k ⎡⎣ 1 c q ⎤⎦<br />
(2.82)<br />
ki<br />
zi<br />
7. Expresia de definiţie a vectorului coloană, notat cu b i , se stabileşte astfel:<br />
{ { } ⎡ ( ) ⎤ ⎡ ( ) ⎤ }<br />
( 0) ( 0) ( 0) T ( 0)<br />
i = 3 ⋅ i + i × − i ⋅Δ i + i ⋅ i ⋅ i − i ⋅ Δi ⋅ i<br />
b I q k ⎣1 c q ⎦ k k ⎣q s q ⎦ v (2.83)<br />
8. Exponenţiala de matrice se determină conform relaţiilor:<br />
y0<br />
pi<br />
xi<br />
Ai<br />
{ }<br />
i<br />
p<br />
i y<br />
xn<br />
{ }<br />
n<br />
yn<br />
zn<br />
n<br />
efectorul final<br />
s<br />
{ n + 1}<br />
a
