

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
31<br />
<strong>PRECIZIA</strong> ROBOȚILOR <strong>INDUSTRIALI</strong><br />
cât mai mică). Valorile mari ale jocurilor determină micşorarea preciziei de rotire a rulmentului şi<br />
neuniformitatea repartizării forţelor pe corpurile de rostogolire, mărind astfel uzura şi micşorând durabilitatea<br />
rulmenţilor, fapt care conduce la creşterea temperaturii de funcţionare şi micşorarea turaţiei maxime de<br />
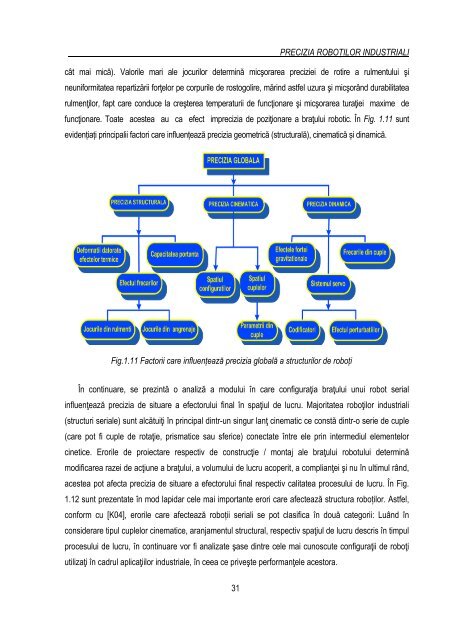
funcţionare. Toate acestea au ca efect imprecizia de poziţionare a braţului robotic. În Fig. 1.11 sunt<br />
evidențiați principalii factori care influențează precizia geometrică (structurală), cinematică și dinamică.<br />
Fig.1.11 Factorii care influențează precizia globală a structurilor de roboți<br />
În continuare, se prezintă o analiză a modului în care configuraţia braţului unui robot serial<br />
influenţează precizia de situare a efectorului final în spaţiul de lucru. Majoritatea roboţilor industriali<br />
(structuri seriale) sunt alcătuiţi în principal dintr-un singur lanţ cinematic ce constă dintr-o serie de cuple<br />
(care pot fi cuple de rotaţie, prismatice sau sferice) conectate între ele prin intermediul elementelor<br />
cinetice. Erorile de proiectare respectiv de construcţie / montaj ale braţului robotului determină<br />
modificarea razei de acţiune a braţului, a volumului de lucru acoperit, a complianţei şi nu în ultimul rând,<br />
acestea pot afecta precizia de situare a efectorului final respectiv calitatea procesului de lucru. În Fig.<br />
1.12 sunt prezentate în mod lapidar cele mai importante erori care afectează structura roboților. Astfel,<br />
conform cu [K04], erorile care afectează roboții seriali se pot clasifica în două categorii: Luând în<br />
considerare tipul cuplelor cinematice, aranjamentul structural, respectiv spaţiul de lucru descris în timpul<br />
procesului de lucru, în continuare vor fi analizate şase dintre cele mai cunoscute configuraţii de roboţi<br />
utilizaţi în cadrul aplicaţiilor industriale, în ceea ce priveşte performanţele acestora.
