

PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI
PRECIZIA ROBOŢILOR INDUSTRIALI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
15<br />
<strong>PRECIZIA</strong> ROBOȚILOR <strong>INDUSTRIALI</strong><br />
Rezoluţia de control (pragul de amorsare) reprezintă cea mai mică modificare de poziţie care poate<br />
fi sesizată şi comandată de controlerul robotului. Pentru a înţelege mai bine acest termen, se consideră<br />
spre exemplu un codificator optic care emite1500 de impulsuri luminoase / rotaţie completă. Astfel,<br />
dispozitivul va emite câte un impuls luminos la fiecare deplasare a arborelui cu 0,24° a arborelui motor.<br />
Această valoare incrementală de 0,24° reprezintă rezoluţia de control pentru această axă de<br />
mişcare iar valorile care se situează sub această limită nu pot fi sesizate de controler. Sistemul<br />
funcţionează la parametri de performanţă atunci când rezoluţia de control şi cea de programare au<br />
valori egale. În acest caz, se poate vorbi de rezoluţia de sistem (rezoluţia sistemului), definită anterior.<br />
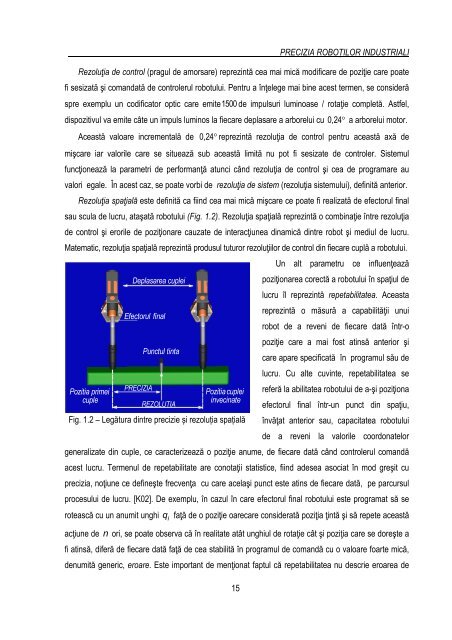
Rezoluţia spaţială este definită ca fiind cea mai mică mişcare ce poate fi realizată de efectorul final<br />
sau scula de lucru, ataşată robotului (Fig. 1.2). Rezoluţia spaţială reprezintă o combinaţie între rezoluţia<br />
de control şi erorile de poziţionare cauzate de interacţiunea dinamică dintre robot şi mediul de lucru.<br />
Matematic, rezoluţia spaţială reprezintă produsul tuturor rezoluţiilor de control din fiecare cuplă a robotului.<br />
Un alt parametru ce influenţează<br />
Deplasarea cuplei<br />
poziţionarea corectă a robotului în spaţiul de<br />
lucru îl reprezintă repetabilitatea. Aceasta<br />
Efectorul final<br />
reprezintă o măsură a capabilităţii unui<br />
robot de a reveni de fiecare dată într-o<br />
poziţie care a mai fost atinsă anterior şi<br />
Punctul tinta<br />
care apare specificată în programul său de<br />
lucru. Cu alte cuvinte, repetabilitatea se<br />
Pozitia primei<br />
cuple<br />
<strong>PRECIZIA</strong><br />
REZOLUTIA<br />
Pozitia cuplei<br />
invecinate<br />
referă la abilitatea robotului de a-şi poziţiona<br />
efectorul final într-un punct din spaţiu,<br />
Fig. 1.2 – Legătura dintre precizie și rezoluția spațială<br />
învăţat anterior sau, capacitatea robotului<br />
de a reveni la valorile coordonatelor<br />
generalizate din cuple, ce caracterizează o poziţie anume, de fiecare dată când controlerul comandă<br />
acest lucru. Termenul de repetabilitate are conotaţii statistice, fiind adesea asociat în mod greşit cu<br />
precizia, noţiune ce defineşte frecvenţa cu care acelaşi punct este atins de fiecare dată, pe parcursul<br />
procesului de lucru. [K02]. De exemplu, în cazul în care efectorul final robotului este programat să se<br />
rotească cu un anumit unghi q i faţă de o poziţie oarecare considerată poziţia ţintă şi să repete această<br />
acţiune de n ori, se poate observa că în realitate atât unghiul de rotaţie cât şi poziţia care se doreşte a<br />
fi atinsă, diferă de fiecare dată faţă de cea stabilită în programul de comandă cu o valoare foarte mică,<br />
denumită generic, eroare. Este important de menţionat faptul că repetabilitatea nu descrie eroarea de
