Forschungsbericht_Papierlose Produktion_15666 ... - Die BVL
Forschungsbericht_Papierlose Produktion_15666 ... - Die BVL
Forschungsbericht_Papierlose Produktion_15666 ... - Die BVL

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
2 Grundlagen<br />
2.2.2.2 Trackingsystem<br />
<strong>Die</strong> wichtigste Anforderung an ein AR-System ist in den meisten Fällen die Positio-<br />
nierung der realen und virtuellen Objekte zueinander. <strong>Die</strong>se Aufgabe wird durch das<br />
Trackingsystem realisiert. Der Begriff Tracking (dt. Spurbildung, Verfolgen) umfasst<br />
alle Bearbeitungsschritte, die zur Verfolgung von Position und Orientierung eines<br />
(bewegten) Objektes zu jeder Zeit dienen. <strong>Die</strong> Ziele des Trackingsystems sind dem-<br />
nach die Extraktion von Informationen über den Verlauf der Bewegung und die Lage<br />
eines Objektes sowie die Verminderung von Abweichungen (relative Fehlerdaten),<br />
welche sich meist auf zufällige technische Messfehler oder physikalisches Messrau-<br />
schen zurückführen lassen [Bau-07]. <strong>Die</strong> Genauigkeit der bestimmten Lage- und<br />
Bewegungsinformation hängt neben dem verwendeten Tracking-Algorithmus auch<br />
von der Genauigkeit der Beobachtung ab. Für die kombinierte Darstellung von rea-<br />
len und virtuellen Objekten ist es unerlässlich, diese entsprechend den geometri-<br />
schen Gegebenheiten richtig aneinander auszurichten. Durch das Tracking wird be-<br />
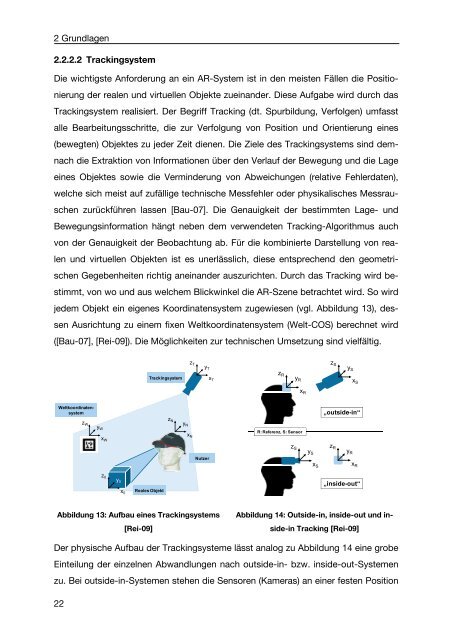
stimmt, von wo und aus welchem Blickwinkel die AR-Szene betrachtet wird. So wird<br />
jedem Objekt ein eigenes Koordinatensystem zugewiesen (vgl. Abbildung 13), des-<br />
sen Ausrichtung zu einem fixen Weltkoordinatensystem (Welt-COS) berechnet wird<br />
([Bau-07], [Rei-09]). <strong>Die</strong> Möglichkeiten zur technischen Umsetzung sind vielfältig.<br />
Weltkoordinatensystem<br />
Abbildung 13: Aufbau eines Trackingsystems<br />
[Rei-09]<br />
22<br />
z W<br />
y W<br />
x W<br />
z 0<br />
y 0<br />
x 0<br />
z T<br />
y T<br />
Trackingsystem x T<br />
Reales Objekt<br />
z N<br />
y N<br />
x N<br />
Nutzer<br />
Abbildung 14: Outside-in, inside-out und inside-in<br />
Tracking [Rei-09]<br />
Der physische Aufbau der Trackingsysteme lässt analog zu Abbildung 14 eine grobe<br />
Einteilung der einzelnen Abwandlungen nach outside-in- bzw. inside-out-Systemen<br />
zu. Bei outside-in-Systemen stehen die Sensoren (Kameras) an einer festen Position<br />
z R<br />
y R<br />
x R<br />
R: Referenz, S: Sensor<br />
z S<br />
y S<br />
x S<br />
z S<br />
z R<br />
y S<br />
y R<br />
x S<br />
„outside-in“<br />
x R<br />
„inside-out“